Photos courtesy of Georgia Tech Research Institute
For about three years, Grady Tuell and the team at Georgia Tech Research Institute have been working to produce a smaller, more efficient version of the bathymetric lidar—a device that employs powerful lasers to image the sea floor. Why? So they can be deployed via UAV.
Today’s bathymetric lidars weigh nearly 600 pounds, and require costly, manned aircraft to carry them. Tuell, the principal research scientist leading the project, envisions a smaller lidar that only weighs about 250 pounds, requires about half the power to operate and is light enough to deploy via a modest-sized UAV—drastically cutting costs, improving efficiencies and extending mission times.
Through what is known as the Active Electro-Optical Intelligence, Surveillance and Reconnaissance (AEO-ISR) project, the team has recently made significant advancements in their research efforts, advancements that should someday eliminate the need to deploy lidars on costly, piloted aircraft.
The Prototype
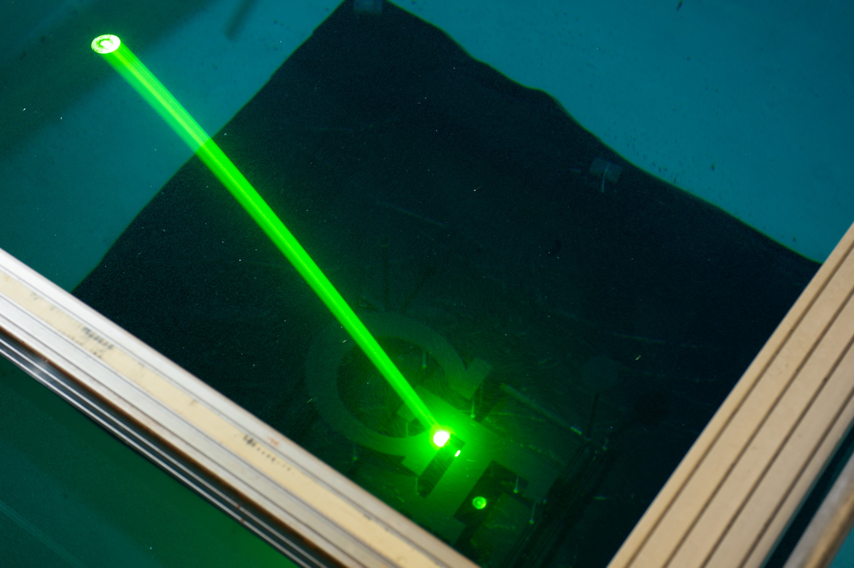
Tuell had his team have developed and tested their first lidar prototype. The team has successfully demonstrated AEO-ISR techniques by installing the lidar prototype gantry over a large water tank in Georgia Tech’s Woodruff School of Mechanical Engineering and then operating it in a manner that simulates flight.
The prototype uses a high-power green laser that fires a laser beam every 1000th of a second, and can penetrate the water to considerable depths. This allows the team to study the best methods for producing accurate images of the objects on the pool’s floor. An operational system would ultimately have much faster lasers pulsing at more than 10,000 times per second.
The team also has finished a CAD design for a deployable mid-size bathymetric device that meets both the power and size requirements. Tuell hopes to have a deployable prototype in place by late summer.
Data in Real Time
Reducing the lidar size and power requirements are huge benefits of this research, but Tuell and his team have other plans for this miniaturized lidar as well. They’re currently researching ways to create a smaller, more efficient lidar that also provides data in real time—making it possible to produce high-res, 3D undersea imagery quickly and accurately. In short, they want the lightweight lidar to provide users with immediate access to its three dimensional point cloud, which describes the seafloor at high spatial resolution.
“Typically these full-sized lidars are flown on four or five hour missions. Once the pilot lands the aircraft, he has to pull the data drive and then begin processing that data. It could be hours, days or weeks before the data is through the processing stream,” Tuell said. “That’s OK in some applications, but in an ISR application you want a fast turnaround. Real time data not only gives you access to the lidar’s three-dimensional point cloud data immediately, it allows you to quickly transmit the results of the imaging mission—not just the raw data—from the bird to the ground station as soon as possible.”
The research team was the first to demonstrate bathymetric lidar coordinate computation and TPU estimates in real time, an accomplishment Tuell describes as an exciting milestone for this research project. How? They developed what’s called total propagated uncertainty, or TPU.
Using statistics, calculus and linear algebra, the TPU technique propagates errors from the individual measurements –navigation, distance, and refraction angle—to estimate the accuracy of the lidar’s sea-floor measurements.
“We’ve demonstrated we can do this in real time,” Tuell said. “This is an important step forward for the entire lidar community, to be able to compute the point cloud and simultaneously be able to predict the accuracy of those lidar points.”
The Challenges
Delivering data in real time is one of the major challenges researchers face with this project, Tuell said, as is making the system as light as possible—a challenge the team is still working to overcome. The key to a lighter lidar is replacing its liquid cooling system with a fully air cooled system. This will help cut the weight in half, and is something Tuell and his team plan to achieve with the first deployable prototype.
More than 30 people have worked on this project over the years, from students to engineers to computer scientists to mathematicians, Tuell said, and they’ve all provided valuable contributions that will help overcome any challenges and soon make smaller, UAV deployable lidars a reality.
“This type of research takes a remarkable team with a lot of different skill sets,” Tuell said. “We have very specialized problems to tackle, and I’ve been fortunate to have many bright students and people at the university help me work on this.”
The Applications
Deploying lidars that provide accurate data in real time via UAVs not only cuts costs, it also enhances both civilian and military applications, Tuell said. On the civilian side, anyone conducting a survey mission for environmental monitoring or surveying and mapping wants to know if the data received meets accuracy standards, and has achieved coverage without any gaps—and they want to know before they leave the project area. Smaller lidars that provide accurate data in real time make that possible.
On the military side, it’s important to get actionable intelligence into the hands of decisions makers as quickly as possible, for any ISR mission. The faster they can access data, the more current their decision making process can be.
This technology also has huge potential for foliage penetration ISR, making it possible to see through the heavy forest canopy and down to the forest floor, as well as enhancing environmental mapping and coastal monitoring, Tuell said.
“As soon as the FAA approves the use of UAVs in the national airspace, we believe UAV deployed lidars will revolutionize coastal mapping and environmental monitoring,” Tuell said.