Inspired by both sailboats and the wandering albatross the wind-powered UNAv can theoretically travel thousands of miles.

The UNAv is the only drone under development that uses dynamic soaring for propulsion—a source of energy that gives it near limitless range.
Drones are increasingly taking to the air across the globe, but at the end of the day, they still have to come down to Earth once their fuel runs out or their batteries run down. Now scientists are designing an autonomous unmanned aircraft powered by the wind that can glide like an albatross when breezes are strong and cruise like a sailboat when they are weak.
OCEAN MONITORING IS VITAL
Increasing the range that unmanned aircraft systems (UAS) can travel could expand their uses into a number of potentially critical applications. For instance, the oceans, which cover roughly 70 percent of Earth’s surface, remain vastly under-monitored because of the limited endurance of aircraft and watercraft.
Specifically, a better understanding of the Southern Ocean—the waters surrounding Antarctica, consisting of the southernmost parts of the Atlantic, Pacific and Indian Oceans—could yield vital clues regarding that region’s role in climate change.
“Climate change is one of the most pressing challenges of our time. It is driven by human activities that release greenhouse gases, in particular carbon dioxide, into the atmosphere,” said Gabriel Bousquet, a postdoctoral associate at the Massachusetts Institute of Technology. “Scientists estimate that one in 10 molecules of the carbon dioxide we generate is trapped by the Southern Ocean. So understanding and preparing for the impact of climate change requires understanding precisely how the Southern Ocean traps carbon dioxide, and perhaps even more importantly paying attention to whether it continues to do so with the same efficiency.”
“Unfortunately, the Southern Ocean is very inhospitable and hard to reach, and besides it is not on major trade routes, so there is little incentive to monitor it, other than scientific endeavors,” Bousquet said. “If we could use low-cost drones to monitor it, it would be extremely useful.”
Ocean-monitoring robots also can help with search and rescue missions, keep an eye on fish stocks, watch protected areas, and gather data for meteorology to, for instance, better model the track of hurricanes, Bousquet said.
“Understanding and monitoring ocean garbage is also a very important task,” he noted. “It seems to be having a very large scale impact on marine life, and by extension, humans.”
BOTH AN AIRCRAFT AND SAILBOAT
Drones currently have limited endurance, ranging from a few hours with batteries to a few days with gas. One way to extend their range is to have them harvest energy from their environment, such as from the wind or sun.
A number of high-altitude, long-endurance solar-powered airplanes do exist, such as Airbus’ Zephyr. However, “there is barely enough energy in solar power to sustain flight,” Bousquet said. As such, to fly for days, solar-powered aircraft are typically severely limited in how much payload they can carry, or they must be huge to catch as much sunlight as possible and therefore are potentially prohibitively expensive.
In contrast, Bousquet’s background is in wind energy. Before his doctoral research, he worked at Makani, which is now part of X, the research arm of Google’s parent company Alphabet. Makani aims to lower the cost of wind-generated electricity “using tethered gliders rather than traditional turbines,” Bousquet said.

Upcoming tests will see how the UNAv performs when equipped with a sail.
Recently, Bousquet and his colleagues investigated the aerodynamics of albatrosses. They focused on the species known as the wandering albatross, which is about the size of a small drone, with a weight of 10 kilograms and a three-meter wingspan. “It flies 1,000 or more kilometers per day, the stronger the wind the better,” Bousquet said. “A few years ago, a team of scientists tagged an albatross with GPS; the bird used a storm with 100-plus kilometer-per-hour winds to fly over 1,000 kilometers in just 10 hours. This is totally mind-blowing to me.”
The researchers found the mechanics that enable albatrosses to cover vast distances while expending minimal energy is their ability to ride in and out of high- and low-speed layers of air. Specifically, the birds can acquire momentum from higher, faster layers of air to propel themselves and soar in lower, slower layers without having to virtually ever flap their wings.
The scientists then noted the physics of albatross flight was very similar to that of sailboat travel. Boats can use sails to acquire momentum from the wind and use it to push against slower-moving water.
Now, Bousquet and his colleagues have designed UNAv, an unmanned nautical air-water vehicle, which is “a wind-powered drone inspired by both sailboats and albatrosses,” he said. “It can be seen as either a flying sailboat or an ‘albatross’ with an added sail and keel.”
Ultimately, if the robot can harvest all the energy it needs for flight from the wind, “there is no need for refueling, so a robotic albatross could survey and study the oceans for weeks or months at a time, traveling tens of thousands of kilometers in a single mission,” Bousquet said.
“A previous study found the albatross spends more energy when it’s walking around its nest than when it’s flying thousands of kilometers in the wind,” said Peter Traykovski, an associate scientist at Woods Hole Oceanographic Institution in Massachusetts. “If you could duplicate that, that could have huge implications for our ability to monitor the oceans.”
VERY LITTLE WIND NEEDED
Albatrosses can only fly at about 25 percent of wind speed, which means they require good winds to soar. In contrast, sailboats can basically travel at 100 percent of wind speed, and so can travel even with low winds, but strong winds can generate waves that are too much for small sailboats the size of UNAv to handle. UNAv is designed to sail when the winds are too weak for flight and to fly when the winds are strong enough to generate waves that would overwhelm a sailboat, Bousquet said.
The design for UNAv involves a long, slender glider-like airframe with a 3.4-meter wingspan, with a thin one-meter-tall triangular sail rising from its center and a narrow half-meter wing-like keel extending below its core. Altogether, the craft would only weigh three kilograms.
The UNAv is designed to fly with its body 40 centimeters above the water’s surface, immersing 10 centimeters of its keel in the water. The research team’s calculations suggest their design could stay airborne in relatively calm winds as low as roughly 6.5 miles per hour—about a third of the wind speed that albatrosses require for soaring—and travel at speeds of about 23 miles per hour given such winds. With a light breeze of about 11.5 miles per hour, they predicted their design could travel at about 40 miles per hour, or about three to 10 times faster than a traditional sailboat.
To move into the wind, the UNAv can, in principle, tack just like sailboats. “Tacking means zigzagging in a succession of lines to move generally upwind or downwind,” Bousquet said.
ONE OF A KIND
Autonomous vehicles known as ocean gliders do currently exist, and are similarly designed for long-range, long-term missions across the seas. However, ocean gliders travel underwater, instead of over or at the water’s surface as the UNAv is designed to do. Ocean gliders adjust their buoyancy to go up and down in the water, and have “wings” that allow them to transform this up-and-down motion into forward motion.
“Ocean gliders are typically battery-powered, so they have a finite range—a finite budget of up and down moves,” Bousquet said. “Underwater gliders and the UNAv are somewhat complimentary—underwater gliders monitor what is at the surface and below, and the UNAv is designed to monitor what is at the surface and above. Of course, traveling in air is faster than traveling in water, and the UNAv does have its aspect of infinite range.”
A number of autonomous surface vehicles—robots that move across the water’s surface—also have been developed. For example, Saildrone in Alameda, California, has developed an autonomous carbon-fiber sailboat, while Liquid Robotics in Sunnyvale, California, a subsidiary of Boeing, has developed Wave Glider, an unmanned ocean robot that harvests both solar and wave energy to help propel itself.
“Saildrone and Wave Glider are capable of long-duration missions, but they are extremely slow—a few knots at best,” Bousquet said. “Conversely, the UNAv is able to travel at 20-plus knots—that is, an order of magnitude faster. Because the UNAv can also fly for short period of times, it can gather atmospheric data and/or long-range visual data that the Saildrone or Wave Glider can’t.”
Other autonomous gliding aircraft do exist, but they rely on thermal soaring, where they are carried aloft by warm updrafts much like eagles. “Of course, the issue with thermal soaring is that it is limited to regions where there are significant updrafts,” Bousquet said. “Even when there are updrafts, it may be hard to find them.” As far as Bousquet knows, the UNAv is the only design capable of dynamic soaring like albatrosses, where updrafts are not necessary.
Bousquet believes UNAv is the only autonomous unmanned vehicle capable of both flight and traveling on the water. He did note there were a number of designs for unmanned aircraft that could also travel underwater, flying either through rotors, fixed wings or flapping wings.
However, “traveling underwater is difficult, because motors are at their peak efficiency in a relatively narrow range of rotation speeds,” Bousquet said. “Air-water vehicles with propellers have their propellers spin very fast in air and very slow underwater. Accordingly, they are probably very inefficient underwater.” In contrast, he said, UNAv is designed for both efficiency and long-range travel.
PROTOTYPE TESTED
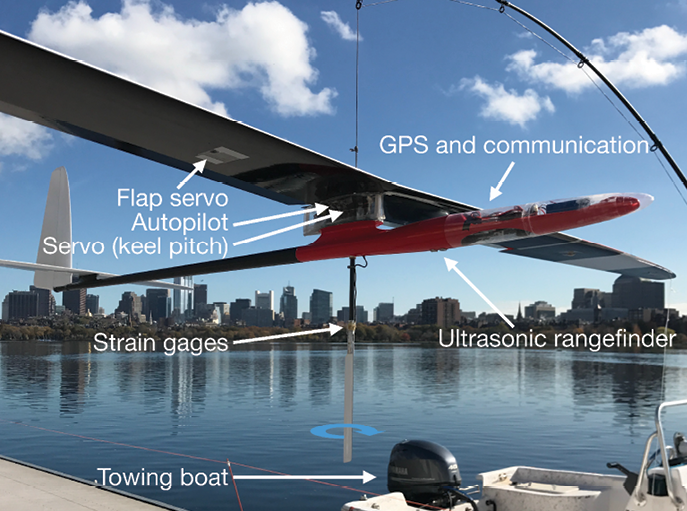
Figure 1: Key systems on the prototype UNAv during its first river test.
The researchers built a prototype to test their design’s critical maneuver—transitioning between flying in the air and dipping its keel down to sail in the water. Accomplishing this move does not necessarily require a sail, so Bousquet and his colleagues Michael Triantafyllou and Jean-Jacques Slotine decided not to include a sail in their prototype to simplify their preliminary experiments.
The scientists tested their prototype on the Charles River. They equipped it with auto-pilot instrumentation, GPS, inertial measurement sensors and ultrasound to help control the craft and track its height above the water.
Because the prototype lacked a sail or any other mechanism to get it moving, the researchers hung it from a fishing rod attached to a boat and towed the robot down the river. “The towing line generates a force very similar to that of a sail, hence it can be thought of as a simulated sail,” Bousquet said.
The researchers used a lightweight off-the-shelf competition glider airframe so it could fly at relatively low speeds. “The flip side of being optimized for lightweightness was that the airframe was not very robust, so we could not afford many crashes and everything had to work just right from the start,” Bousquet recalled. “This made testing quite stressful.”
All in all, when the prototype reached a speed of about 20 miles per hour, the robot autonomously flew, successfully riding the wind on its own. A remote microcomputer could then send the robot orders to dip low enough to submerge its keel in the river, steer away from the tow boat, and then fly back up, lifting its keel out of the water.
FUTURE DESIGNS
Bousquet envisions the UNAv will have auxiliary solar cells on its wings and a foldable propeller driven by solar power. “Every now and then—say, 5 percent of the time—we envision that the UNAv will use its solar-charged propeller to zoom to higher altitudes to gather data of interest,” he said.
He also noted this design is geared toward small vehicles. “It will not work for airliner-sized systems,” he said. “Larger systems have a heavier mass per amount of wing area, so they require more wind to stay aloft.” Still, “at the upper end of possible weight and sizes, a recreational one-seater ‘flying sailboat’ is physically plausible, which would be really cool,” he noted.
Traykovski, who investigates how storms interact with coasts, envisions one day dropping a few of these robots into hurricanes. “Right now NOAA [the National Oceanic and Atmospheric Administration] monitors hurricanes with hurricane hunter airplanes, which carry out overflights to drop a few instruments into the storms to measure their pressure and other properties at a given time,” he said. “With robotic albatrosses, you can imagine them staying with a hurricane as it goes up the coast for weeks at a time.”
Future research not only needs to test how UNAv performs with a sail added to it, but to explore how well it performs against waves. Still, with low winds, waves are relatively small, “so touching the water is a manageable challenge,” Bousquet said. In contrast, with high winds and waves, “there is enough wind to be flying like an albatross, and no need to dip the keel in the water, so in principle, the waves are less of a problem.”
To help UNAv deal with any large waves that it cannot avoid, there is technology “for drones to autonomously navigate through forests using machine-vision and path-planning algorithms,” Bousquet noted. “We want to use these technologies to teach the UNAv how to fly in strong weather with large waves.”
Future research should explore what the UNAv should do in case of a crash. Bousquet noted there are prototypes of small UAS that are able to crash land on water and take off again, and researchers may want to pursue a similar robust design with UNAv. On the other hand, scientists may pursue “swarms of disposable systems where crashing is an event just rare enough that swarms are able to perform their monitoring mission even if some UNAvs crash,” Bousquet said.
“There is still a long way to go when it comes to performing robust, long-endurance, wind-powered missions with the UNAv,” Bousquet said. “There is extremely exciting research and development ahead that requires merging aerospace technologies, machine vision and artificial intelligence for flying in waves, and bioinspired technologies.”




