
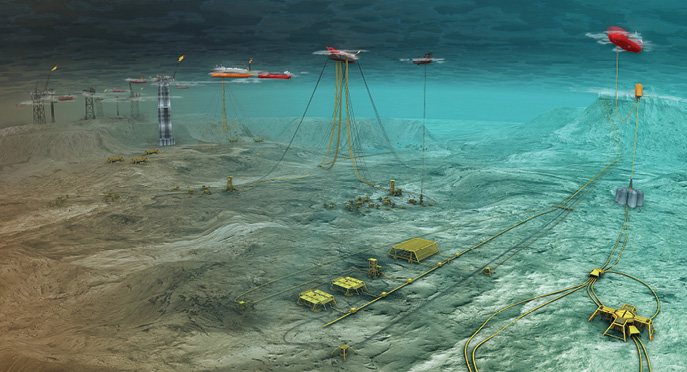
Emerging technologies will soon make it possible for autonomous underwater vehicles to remain on the seafloor for extended periods of time. This should dramatically decrease the cost of inspecting, maintaining and repairing subsea oil and gas facilities.
Autonomous robots are escaping from the pages of science fiction to take up residence as live-in caretakers for the vast oil and gas facilities on the seafloor.
Up to now, energy companies have been inspecting, maintaining and repairing their subsea facilities by sending remotely operated vehicles (ROVs) down from the surface. These tethered ROVs, however, require a pilot to monitor and direct them, and that, in turn, requires a surface ship and crew. The entire undertaking can cost millions, even for a relatively short excursion.
“There are some places in the world that, because of the assets that are available it’s a little bit cheaper, but we haven’t seen anything that doesn’t hover around the $200,000 a day mark,” said Diana Grauer, director of external technology engagement at TechnipFMC, a London-based firm that provides technology, engineering, construction, equipment and installation services for energy companies.
RESIDENT SYSTEMS
To slash costs, firms are developing systems that can stay on the seafloor and be operated without tethers. Called “resident systems,” these combinations of charging stations, communications nodes and autonomous underwater vehicles (AUVs) will be able to handle a wide variety of tasks. The AUVs will navigate themselves to a work area, run along a pipe to assess corrosion and, if they spot a problem area, hover over it for a closer look. The three systems described below are very different, but each comes with manipulators that can grab and hold on to things as needed. They can also change out and use a variety of sensors and tools to do inspections, clean surfaces and perform such basic tasks as turning valves.
SEAEYE SABERTOOTH
Saab Seaeye is now offering the Seaeye Sabertooth, which should soon be able to work on the seafloor autonomously for at least six months. The UK division of Saab AB produces the Sabertooth in three versions: a single hull and a double hull model that go to depths of as much as 1,200 meters, and a double hull, deep-dive configuration that goes to 3,000 meters.
That deep-dive model comes with a 30 kWh battery, which is three times the capacity of the battery on the single-hull Sabertooth. This combination of vessel size and battery power enables the Sabertooth to carry more payload to greater depths and linger there longer.
“When we’re talking the energy sector—mainly oil and gas and renewable offshore wind farms and other things that are in the ocean—they would like to have the system on the seafloor as long as possible,” said Peter Eckers, sales director for Saab Dynamics Underwater Systems.
Saab is now poised to change the Sabertooth’s typical mission. In June, Saab demonstrated a charging station that will enable the Sabertooth to stay stationed on the seafloor. Depending on the size of the facility Saab customers envision three to four charging stations per Sabertooth, Eckers said.
The Sabertooth may be unique in that it enters this new phase as a well-established vehicle with a 10-year track record. Moreover, Saab not only demonstrated the recharging capabilities of its new subsea stations; it showed how the stations could perform as communication nodes for transmitting data and commands. Resident systems are where the business is going, Eckers said. “We are putting out quotes for it all the time now.”
It takes four to six hours to recharge at the station, which, under normal conditions, would enable the vehicle to travel for 14 hours at 3 knots, Eckers said. There may soon be advances in quick-charging technology thanks to the shift to electronic cars and buses, he added, as well as standardization. “The industry is looking to have a generic interface,” he said, so that a variety of AUVs can use the same charging infrastructure. “It’s like a car charging station. You can come with a Chevrolet or a Dodge or a Ford or a Nissan or whatever—you can charge, that doesn’t matter.”
The Sabertooth has the ability to switch out its grippers for sensors and tools like a torque tool that, once attached to a valve, will be able to turn it. Most of the sensors are fairy standard but one coming up soon is new—an underwater LiDAR. This form of laser ranging will be useful at greater depths where the water is clean. It can be used for navigation, recognition, mapping and machine learning. Saab is also developing a simultaneous localization and mapping (SLAM) sensor. SLAM enables an AUV to construct or update a map of an area while simultaneously keeping track of its own location on that map.
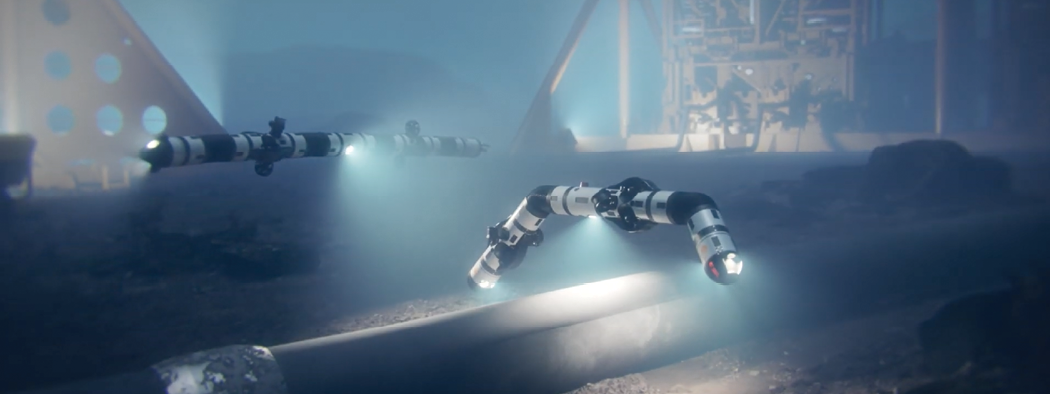
EELUME
The team at Norway’s Eelume is taking a radically different approach with its highly maneuverable, eel-inspired robot.
The slender AUV, which measures only 20 centimeters in diameter, comprises a series of battery and prolusion segments with a sensor and communication segment at the center and joint modules holding everything together. The thruster segments, each with two thrusters pointed along the length of the robot and two pointing out from the sides, enable the Eelume to swim and rotate with the liquid grace of its natural inspiration.
At each end is a segment with lights and a camera and the ability to interface with a variety of tools and payloads, including grippers, that can grasp objects and elements of the infrastructure itself to get leverage. Though the robot can only carry payloads of a few kilograms, it does not need much power to do jobs like turn valves.
“We are not going to operate a subsea valve,” explained recent Eelume CEO Arne Kjorsvik. “We are flying in a torque tool to operate the valve. And this torque tool is connected to the valve, sticks to the valve, and you don’t need to apply any external force from the robot itself. All the torque generation, and all the force generation, is taken care of by the torque tool.”
The Eelume will also be able to integrate cleaning and cutting tools as well as sensors to do inspections. The focus now is primarily on proving out the vehicle itself and maintaining the necessary flexibility to offer the equipment that customers will ultimately want.
Eelume already has a way to give clients one thing they want—longer missions. All that is needed is to add more battery segments.
“It’s a very flexible system,” Kjorsvik said, “and the truth of the snake architecture is that if you need more batteries on the robots you just add more batteries in the longitudinal direction.” There may be some practical limitation on how long you can make an Eelume robot, he said but, with additional battery segments, “I think you’re talking about days of operation.”
Recharging will be done with an inductive charger so that the recharger and the Eelume never actually touch. In time, it will be possible to both recharge and reconfigure an Eelume robot while it is resident on the seafloor, Kjorsvik said. To do that “we send down lots of different modules that can be reassembled in any configuration.”
The Eelume company is working with Equinor ASA, a multinational energy firm based in Stavanger, Norway, to qualify the AUV for operations in the North Sea. They are bringing the robot up to a technology-readiness level 4—that is, proving the robot works in a real-world scenario in the field.
“We’ll probably be installing at least two robots during the pilot installation,” Kjorsvik said. “One robot is configured as an inspection robot; the other will carry tools to operate different types of valves.” All control of the Eelumes will be handled from a shore-based control center.
The Eelume is set for another milestone—a qualification involving the standards organization DNV GL “That’s one of the important steps for us.” Kjorsvik said. “That means a third party is coming in and checking our systems, if they are
safe and reliable—to make sure that the quality is at an acceptable level.”
The qualification test will involve Eelumes that are just 2.3 meters long, small enough to slip in and inspect tight spaces. The depth rating is 500 meters and there have been trials down to 370 meters.
The firm will move away from its tethered test vehicles and do a pilot for Equinor with an autonomous version of the Eelume in 2020 or 2021. Next year, the firm also plans to demonstrate how an Eelume can travel down the length of a pipe, imaging its top and sides more fully. The AUV does this by running perpendicular to the pipe in a bent configuration, with its nose and tail sections tipped down to catch a better view of the pipe’s sides. An Eelume can do this along a pipe on the seafloor and up and down the pipes running up to the surface.
Being able to trace a pipe for days presents some interesting navigation challenges. Options to handle these include inertial navigation units that can be corrected using reference points in the terrain. Also, Kjorsvik said, “you can either go to the surface and get a GPS fix or you can have an acoustical communication link. That also gives you the right position.”

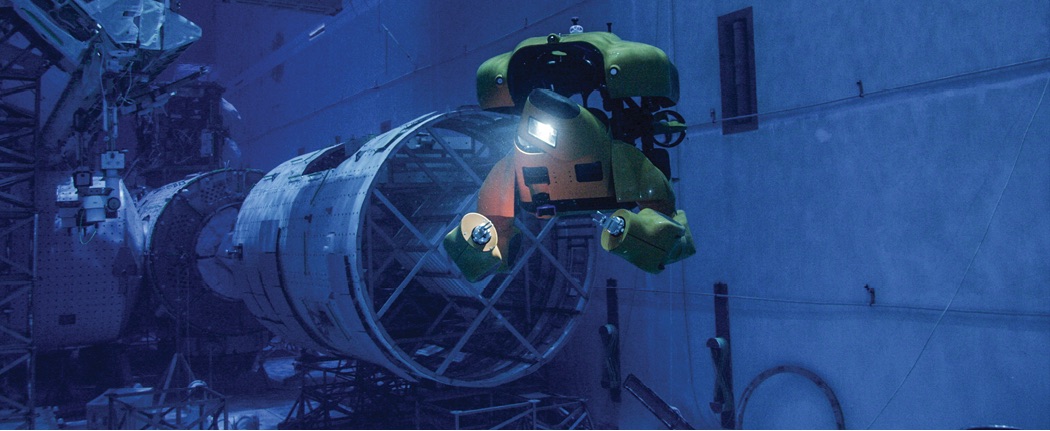
AQUANAUT
Houston Mechatronics is developing the Aquanaut, a hydrodynamically efficient, torpedo-shaped vehicle that can open up and reshape itself into a ROV-like robot The ROV configuration has extra thrusters on the sides and two manipulator arms with grippers that can be swapped out for other tools. Those tools are carried in the Aquanaut’s internal payload bay.
The design is the product of the Webster, Texas-based Mechatronics team, the core of which once built robots for NASA. They took a clean-sheet approach to creating a vehicle that could efficiently travel long distances underwater and then do the work with the necessary tools once it got to a project site.
“We reinvented the AUV and the ROV and it ended up being the world’s first underwater transformer,’’ said Nicolaus Radford, the company’s co-founder and chief technology officer. “…It’s not actually that difficult to go from something that is hydrodynamically sleek, that can swim for 100 kilometers, and then reconfigure itself to be a hoverable, station-keeping platform to interact with the world on the seabed or within the water column.”
The ability to travel long distances enables more of a “virtual residency” model, Radford said, where companies will not buy Aquanauts but subscribe to services the Aquanauts provide. Radford envisions a lily-pad approach to housing the Aquanauts, stationing them on existing assets like drilling ships and platforms and sending them out as needed.
Those who subscribe to a top-tier level of service are guaranteed that they will get an Aquanaut in their area within a short period of time, even if it takes more than one AUV. “Let’s say that you simply want to have 50 valves turned in a subsea field and serial number 14 Aquanaut starts the job and serial number 27 Aquanaut finishes the job. You don’t care that I swapped Aquanauts,” Radford said.
The subscription-service approach enables the company to capitalize on efficiencies across multiple customers. “My desire is to compress all the non-value-added time in the subsea work instruction that doesn’t make money. I want to strip out everything that traditional operations are doing right now that do not make anybody any money or cost people money unnecessarily.” Radford would not say how many Aquanauts would be needed for this approach but that it’s more than three and location-dependent.
To control the Aquanauts across different tasks and send in the data they’ve gathered, Houston Mechatronics also plans to build its own networks of acoustic modems. The modems will not be tethered and could be as simple as buoys or autonomous surface vessels no bigger than a canoe. The scale, or even the need for, such a network in a particular place will depend on the work at hand.
“It depends greatly on what [the Aquanaut’s] doing, on how much a priori [tele]com infrastructure needs to be put in place. But as a general rule we will be installing a network of acoustic modems in order to support the operation of this robot,” Radford said.
The company is also bringing proprietary technology to the table to handle data a bit differently. Its software leaves some data out and compresses the rest, easing the load on stretched communications systems while still transmitting enough information to make necessary decisions. Large batches of data can be sent topside via data depots, Radford said.
DATA DELUGE, DATA SOLUTIONS
Transmitting potentially huge amounts of data is one of the issues Diana Grauer of TechnipFMC is working on. “So, the challenge
that we face with our equipment is often we have legacy equipment installed subsea and it’s been there for 10, 20, 30 years,” she said. “Those systems may or may not have been upgraded with the power and communications infrastructure that we would need to plug in these new solutions that are being brought to us by these technology companies.”
Compounding the communication problem is the desire to collect substantial amounts of new information to better anticipate needs and improve operations—something that resident systems will make far less costly. Such efforts can range from harvesting data from new sensors on pipelines to collecting and comparing inspection results over time to track corrosion and wear as a way to plan repairs.
Grauer does not think any one technology can provide all the answers. She envisions a cell phone-like network that will incorporate all the underwater communications options—acoustic, optical and fiber—seamlessly switching between them as needed. To realize that scenario, Grauer is working with the Center for Marine Robotics at the Woods Hole Oceanographic Institution, in Woods Hole, Massachusetts. She and James Bellingham, the Center’s program director, are putting together a working group that will focus on the architecture needed for seamless subsea communications.
The challenge, Grauer continued, “is that we have to bring a lot of different groups into the space to collaborate with us to really develop a solution.” The time is right for this, suggested Bellingham. The inventory of offshore installations is growing thanks to wind farms and aquaculture, and that’s driving big investments to support more subsea inspection and maintenance. In addition, he said, the aversion oil and gas firms have previously shown toward new technology eased during the recent downturn as they saw how innovation could help them cut costs and stay competitive.
“At one time,” Bellingham said, “you could put your several-billion-dollar infrastructure in place for your offshore field and you knew you were going to make money—boom. Not anymore.” Energy companies want to cut costs, he said, and we want them to be safer. “So how do you do that? Well, part of the way is increasing automation and increasing the use of data. Those two things go together.”




