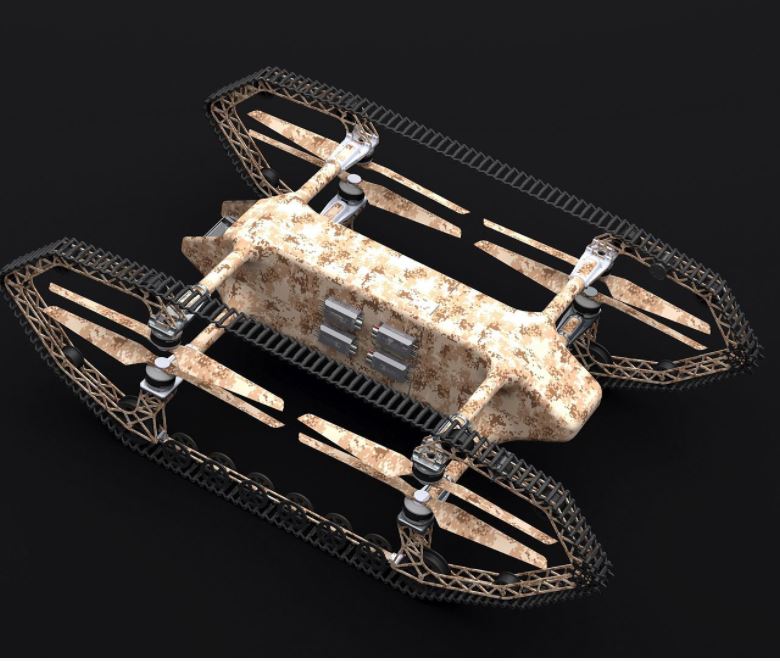
The Hybrid UAV-UGV for Efficient Relocation of Vessels (HUUVER) creates a platform combining two types of propulsion systems, flight and ground traction, in a compact and highly integrated autonomous system.
HUUVER
The HUUVER drone will be the first fully integrated with the Galileo navigation system, profiting from the authentication service and precise navigation solution. The system will also include a server-based application connected to the drone with features like planning and management of the drone mission and navigation. An important part of the system is a mobile mission launch and control tool.
HUUVER connects the advantages of both flying and driving machines, enabling almost all-terrain movements such as flying, perching, driving, climbing, vertical take-off and landing. It will be constructed to perform professional missions in various,difficult conditions, able to reach ground areas unaccessible by air and vice versa.
An application will be available for download on mobile devices enabling users to check the availability of the drone and call it to perform a rescue mission, watch the drone localization, its time to arrival, health of the system and many others in connection with status of the mission.

HUUVER
HUUVER is an international project developed by seven entities from five UE member states: Poland, Austria, Finland, Czech Republic and Spain. The project Partners are Cervi Robotics / Dronehub, Brimatech, Rectangle
Lappeenranta-Lahti University of Technology (LUT), everis, GINA Software annd Bladescape
The project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 870236.




