Ignacio José Calomadre Heras, Francisco Milán Cabrera, Alberto Villarrubia de Juan, Miguel Ángel De Frutos Carro, UAV Navigation–Grupo Oesía
Formation flight of unmanned aerial vehicles (UAVs) represents a key advancement in autonomous defense and security operations. This capability, already implemented in systems such as UAV Navigation–Grupo Oesía’s VECTOR Flight Control Systems, enables multiple unmanned aircraft to maintain precise relative positions during flight, operating under a “leader” and “wingmen” logic.
Since the early days of military aviation, formation flight of multiple aircraft has been an essential technique that provides clear operational advantages. Among the most relevant are mutual defense, reduced workload for pilots, and simplified tactical coordination. Together, these benefits increase the effectiveness, safety, and cohesion of air operations, making squadrons more lethal and resilient on the battlefield.
In the case of unmanned aerial vehicles (UAVs), some of these advantages do not directly apply due to the absence of onboard pilots and the centralized command from ground control stations. Nevertheless, new challenges and opportunities arise that make formation flight a particularly valuable capability in modern combat scenarios.
There are applications that require the synchronized flight of a large number of UAVs. A prominent example is coordinated loitering munition attacks, designed to saturate enemy air defenses. In such scenarios, managing multiple aircraft imposes a high workload on the human operator [1]. To mitigate this issue, abstract commands such as “form up” are employed, allowing the UAVs to be treated as a single tactical unit. Autonomous formation flight capabilities are therefore indispensable.
Similarly, collaborative navigation [2], in which UAVs share in real time their position, sensors, trajectories, and environmental conditions, requires advanced formation flight techniques. This cooperation significantly enhances mission effectiveness and safety, especially in contested environments.
These capabilities are precisely one of the pillars of the Future Combat Air System (FCAS) program, which envisions joint operations between manned aircraft and Remote Carrier UAVs in coordinated flight. In this context, formation flight emerges as a critical capability for distributed, adaptive, and resilient air operations.
To make this capability viable, a series of technical challenges must be overcome, as described below.
Accurate PNT Solution: To enable close formation flight, a precise positioning solution is required. This solution may provide either absolute precision or only relative positioning with respect to the other aircraft in the formation. The integrity of the PNT solution and the synchronization of information are key to maintaining position within the formation.
Intra-formation Communications: One of the main vulnerabilities in formation flight is the loss of communication links between the aircraft and the ground control station (GCS), which may cause the formation to break. To mitigate this risk, it is advisable to have a direct communication channel between aircraft, enabling them to share their state vector and intentions in real time. Alternatively, non-cooperative localization methods can be used, based on onboard sensors such as cameras or radar systems, allowing each UAV to estimate the relative position of the others without data exchange.
Relative Guidance and Control: The guidance and control system must be specifically designed to operate in relative mode, taking into account 4D trajectories (position and time). This includes both following a relative position with respect to the leader and precise coordination for synchronized entry into the formation at a designated rendezvous point [3].
Operational Envelope Protection: Each aircraft must respect both its own dynamic limitations and those of the other formation members, adapting its operational envelope according to its relative position. This management of safety zones ensures formation integrity and prevents collisions, even during dynamic maneuvers or configuration changes.
Coordinated Emergency Maneuvers: The system must incorporate synchronized evasive procedures in the event of critical failures during formation flight. The primary goal is to guarantee rapid and safe separation between aircraft through coordinated maneuvers, safeguarding the formation from loss of control, sensor failures, or navigation errors.
The purpose of this document is to describe the solution developed by UAV Navigation–Grupo Oesía to enable the execution of such operations. It details the different implementations designed to address the technical challenges outlined in the introduction, and concludes with a discussion of the results obtained during flight validation tests.
Materials and Methods
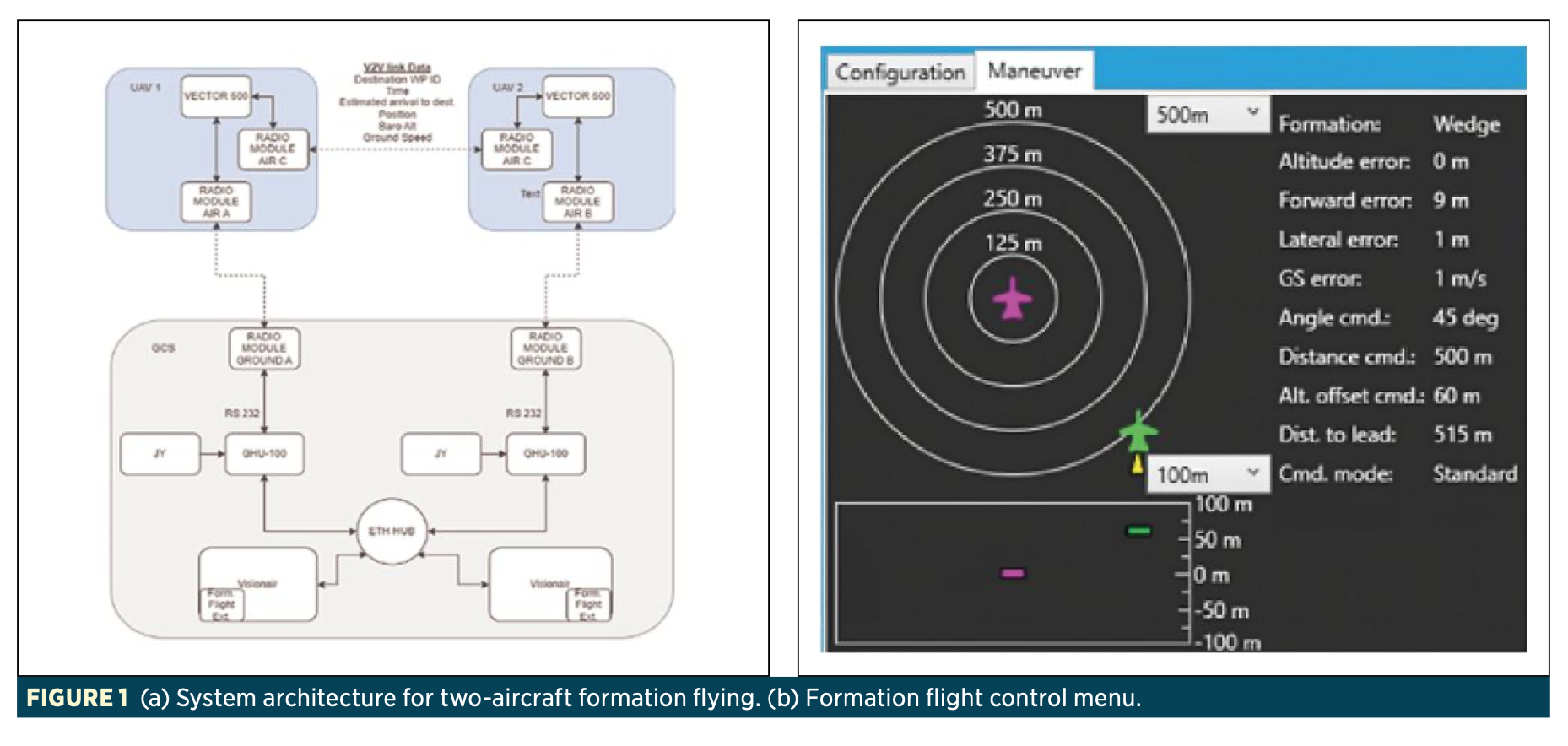
The solution developed by UAV Navigation–Grupo Oesía is based on a collaborative communications architecture. The aircraft share information about their position and intentions through a dedicated vehicle-to-vehicle (V2V) communication network. Thanks to this architecture, once the initial command to enter formation is issued, the system operates autonomously, maintaining the formation even in the absence of a link with the ground control station. The functional architecture of the system is shown in Figure 1.a).
The operator has access to a dedicated interface from which different formation types, such as “wedge” or “fighting wing,” can be selected and activated. This interface also enables monitoring of aircraft behavior through a visual menu (Figure 1.b), thereby enhancing operator situational awareness. From that point onward, the VECTOR FCS flight control system autonomously manages both the convergence into formation and its maintenance, significantly reducing operator workload.
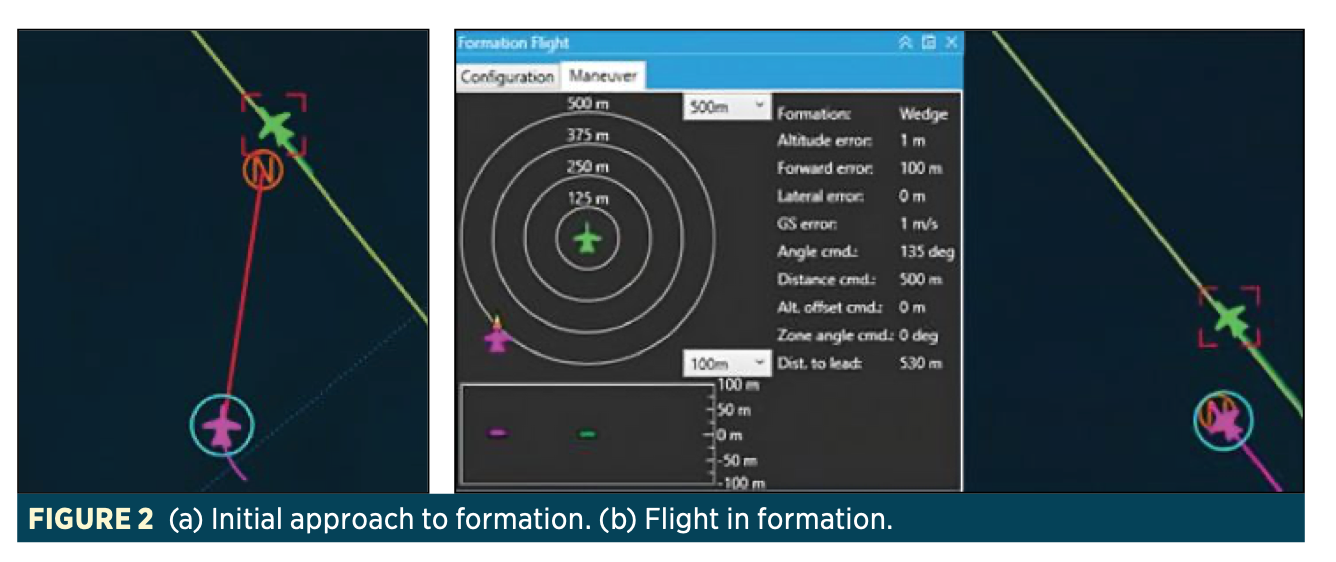
Once the formation entry command is received, the FCS coordinates an arrival time to the leader’s current position, applying a lateral and temporal offset based on the selected formation parameters (Figure 2.a). The details of this flight logic can be found in other works by UAV Navigation-Grupo Oesía [3].
When the UAV reaches its assigned position, the system evaluates whether the conditions to begin coordinated flight are met (Figure 2.b). If so, the aircraft starts navigating with respect to the leader’s past positions. In this mode, the UAV follows historical positions of the leader that have been stored.
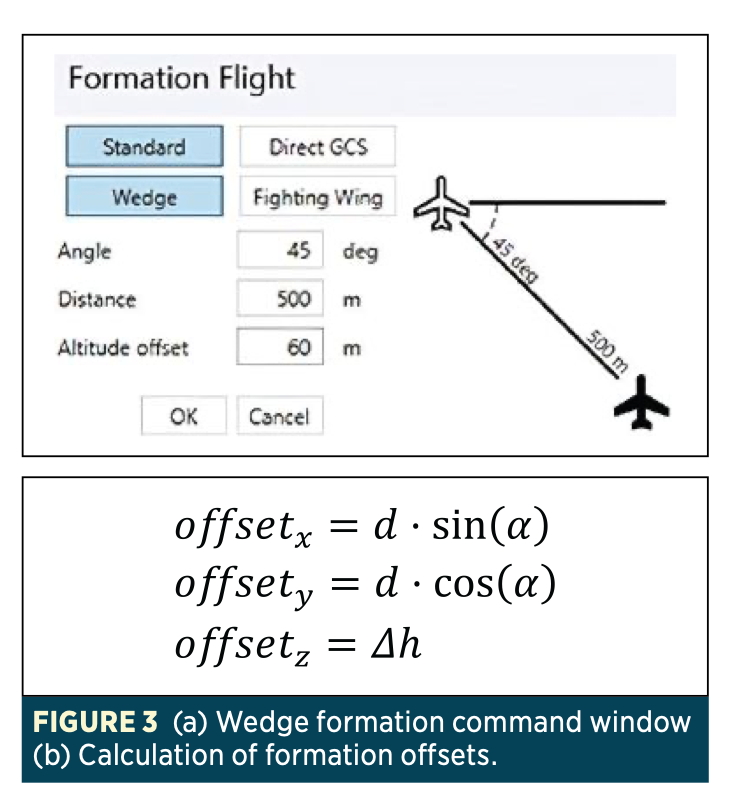
For example, in the case of the wedge formation (Figure 3.a), the input parameters include an altitude offset, a formation angle, and an inter-aircraft distance (Figure 3).
To maintain position within the formation, the aircraft’s speed control (eq. 2) receives a command calculated from the longitudinal error between the aircraft’s position and the target position in the formation. In addition, the lateral and vertical offsets and the leader’s angular velocity are taken into account to compensate for trajectory differences when generating the speed command for the wingmen relative to the leader.
During flight, three-dimensional safety zones are defined for each UAV. If one of them exceeds these limits due to a navigation error or system failure, an automatic evasive maneuver is triggered. This maneuver consists of deviating the heading 30° outward from the formation and climbing 100 meters, ensuring safe separation from the rest of the group.
Furthermore, each UAV continuously monitors the status of its critical systems (health monitoring). If it detects that it no longer meets the minimum requirements to remain in formation, the rest of the aircraft are notified and an autonomous, coordinated exit procedure is executed.
Results and Discussion
To validate the formation flight maneuver, tests were carried out both in simulation and in real flight. In the first phase, a Hardware-in-the-Loop (HIL) environment developed by UAV Navigation–Grupo Oesía was employed, allowing verification of system behavior under different formation configurations, navigation conditions, and link losses.
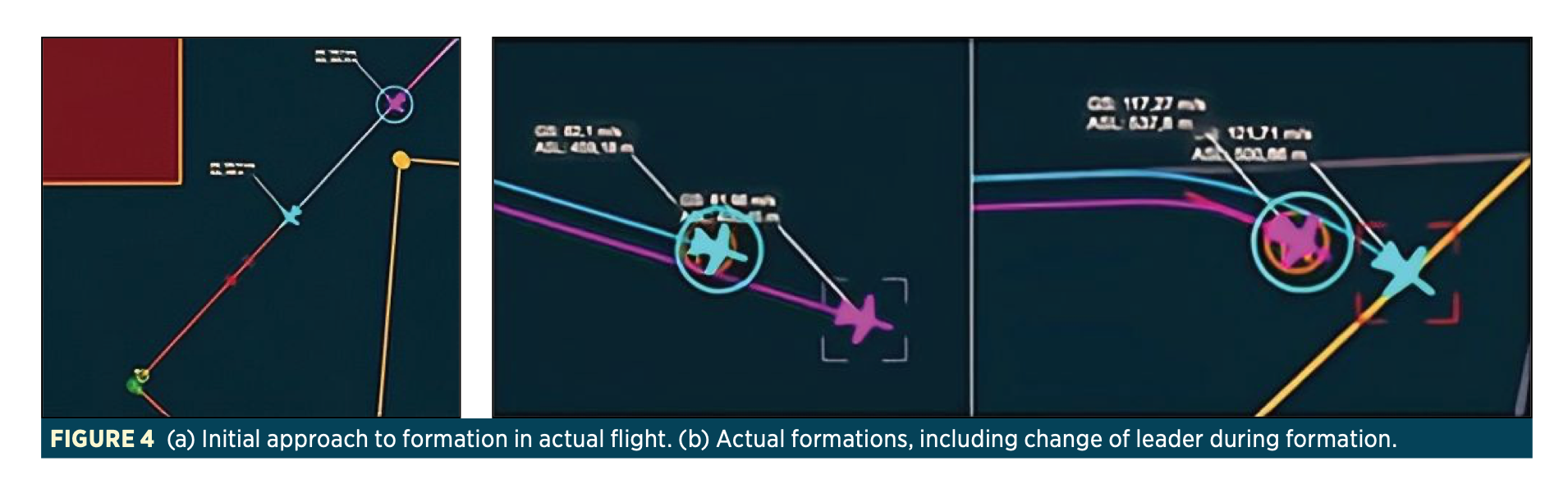
Subsequently, flight tests with real UAVs were conducted in two progressive phases. In the first, lightweight platforms with masses below 25 kg and speeds under 30 m/s were used, with the objective of validating the control logic, formation entry and exit maneuvers, and the safety system. After successful validation, tests were conducted in a representative operational environment (TRL 7), using high-performance UAVs with a maximum takeoff weight (MTOW) of up to 150 kg and flight speeds approaching Mach 0.5. These tests were carried out at the INTA-CEDEA (El Arenosillo Test Center), providing a controlled and safe environment for validation under real-world conditions.
During these tests, the system’s capability to maintain stable formations was confirmed, even during dynamic maneuvers and leader changes. Functional formations were observed with minimum separations of less than 200 meters between aircraft, depending on platform speed and maneuverability.
These results demonstrate the feasibility of operating multiple UAVs in close formation in a safe, autonomous, and robust manner, validating the system as an operational capability applicable to real defense environments.
Conclusions
The system developed by UAV Navigation–Grupo Oesía has proven to be a safe, efficient, and operational solution for the formation flight of unmanned aerial vehicles. The tests conducted, both in simulation and real flight, have validated its functionality across different scenarios, including dynamic operations, leader changes, and emergency maneuvers.
The results obtained confirm the feasibility of employing this capability in real defense missions, enabling precise coordination among multiple UAVs in an autonomous manner while significantly reducing operator workload.
As future development lines, the system aims to increase robustness in electromagnetically degraded or contested environments, exploring alternative inter-aircraft communication methods less vulnerable to interference, such as free-space laser links. Additionally, the incorporation of non-cooperative relative navigation methods, based on computer vision, will be studied to ensure operability in the complete absence of communications.
References
[1] A. Hocraffer, C. S. Nam, “A meta-analysis of human-system interfaces in unmanned aerial vehicle (UAV) swarm management,” Applied Ergonomics, vol. 58, pp. 66–80, Jan. 2017. doi:10.1016/j.apergo.2016.05.011
[2] A. Ahmad, D. B. Licea, G. Silano, T. Baca, M. Saska, “PACNav: A collective navigation approach for UAV swarms deprived of communication and external localization,” Bioinspiration & Biomimetics, vol. 17, no. 6, pp. 1–19, Nov. 2022. doi: https://doi.org/10.48550/arXiv.2302.05258
[3] I. J. Calomarde, A. Villarrubia, J. Blesa, I. Camiruaga, M. A. de Frutos, “Coordination of multiple UAS through time-commanded 4D trajectories,” DESEi+d 2023, p. 163.
Bio: UAV Navigation-Grupo Oesía is a company specializing in the design of guidance, navigation, and control (GNC) solutions for Unmanned Aerial Vehicles (UAVs) since 2004. UAV Navigation-Grupo Oesía’s flight solutions are used by a wide range of leading aerospace manufacturers for a variety of Unmanned Aerial Vehicles (UAVs), also known as remotely piloted aircraft systems (RPAS) or “drones.”
UAV Navigation is part of the Grupo Oesía, a Spanish multinational company dedicated to dual-use digital and industrial engineering, which develops and implements projects in more than 40 countries.




