When not discovering lost World War II submarines, veteran explorer Tim Taylor is developing a hovering autonomous vehicle and the JETTE thruster control system he believes could revolutionize underwater research, inspection and surveillance—making the ocean deeps more accessible than ever before.
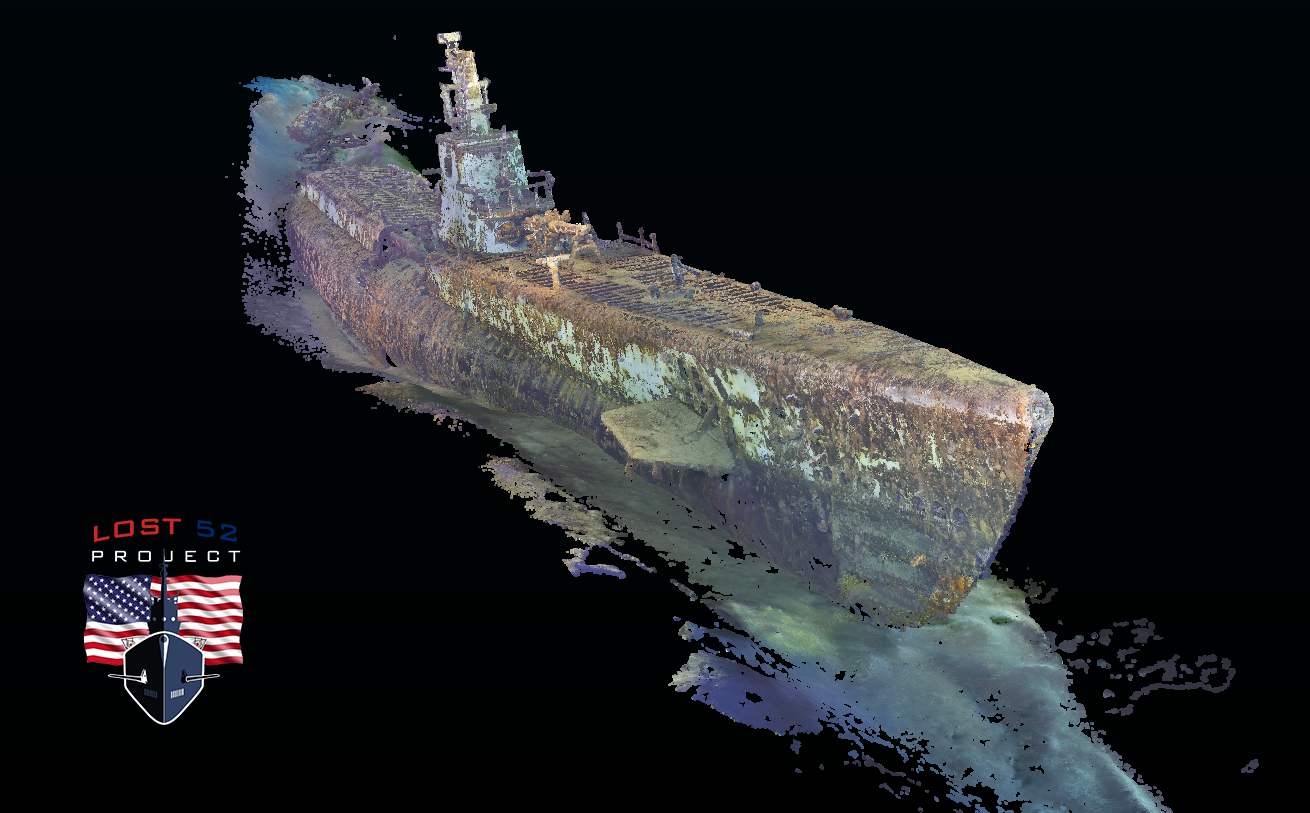
May was a good month for Tim Taylor, one of the planet’s most experienced and celebrated underwater explorers and experts on undersea robotics. The Navy confirmed his report that his Lost 52 Project had successfully located the wreck of USS Harder, an illustrious submarine that vanished in a battle near Luzon in 1944. It’s the ninth such wreck located since he founded the Lost 52 project 15 years ago, a private organization named after the number of U.S. submarines lost in World War II. It is a philanthropic effort for which the Navy has awarded him the Distinguished Public Service medal.
But Taylor didn’t just find a forgotten WWII submarine in May; his new startup Tiburon Subsea, Inc., had just completed a new robotic underwater vehicle with a patent-pending thruster control system that is now swimming in a tank in Alameda, California. His business partner and longtime collaborator, Sylvia Earle, reports “It’s working in the tank; it’s exceeding all performance expectations.”
This vehicle is but the first testbed for his plans to build his very own autonomous robot fleet.
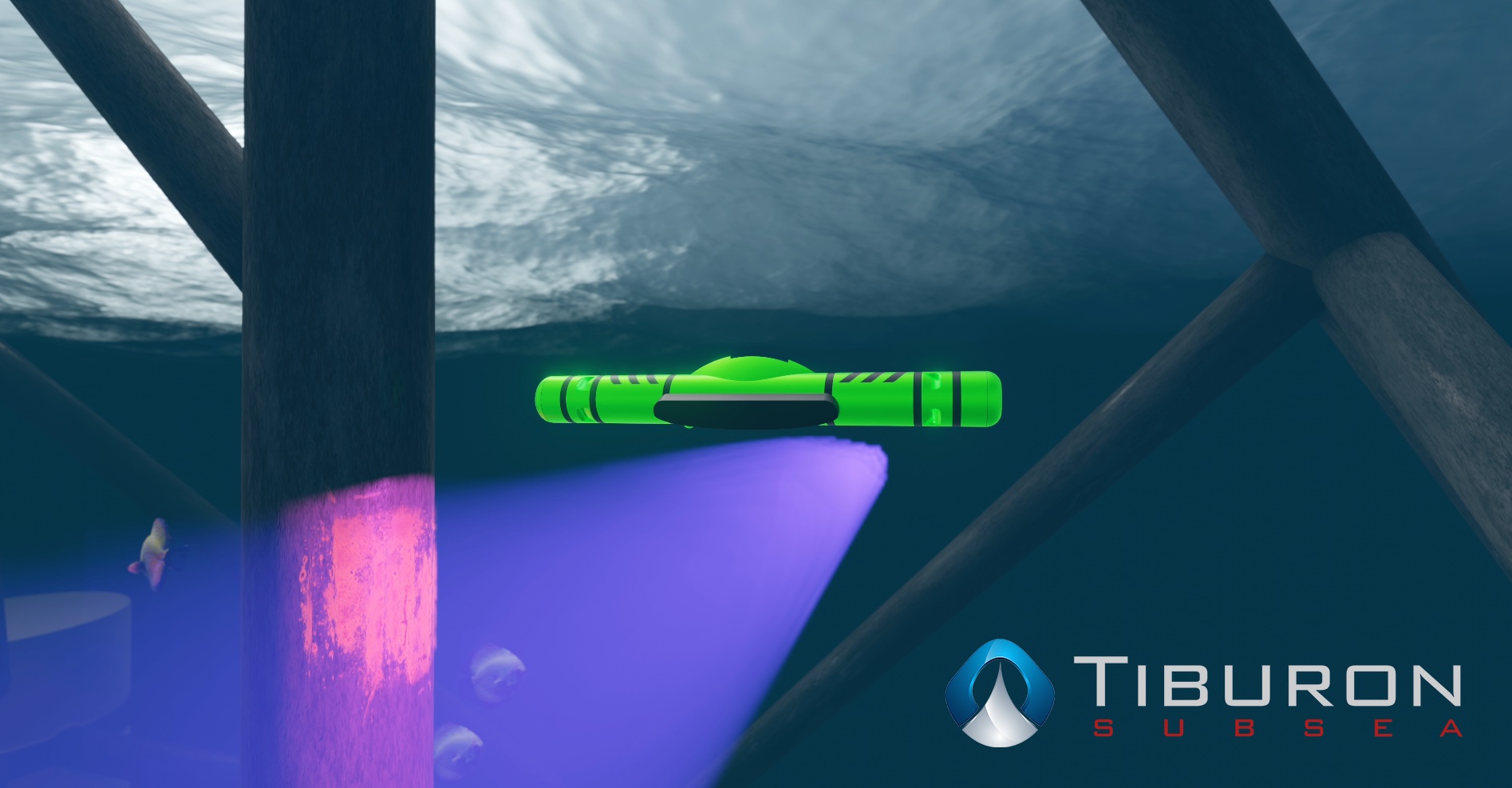
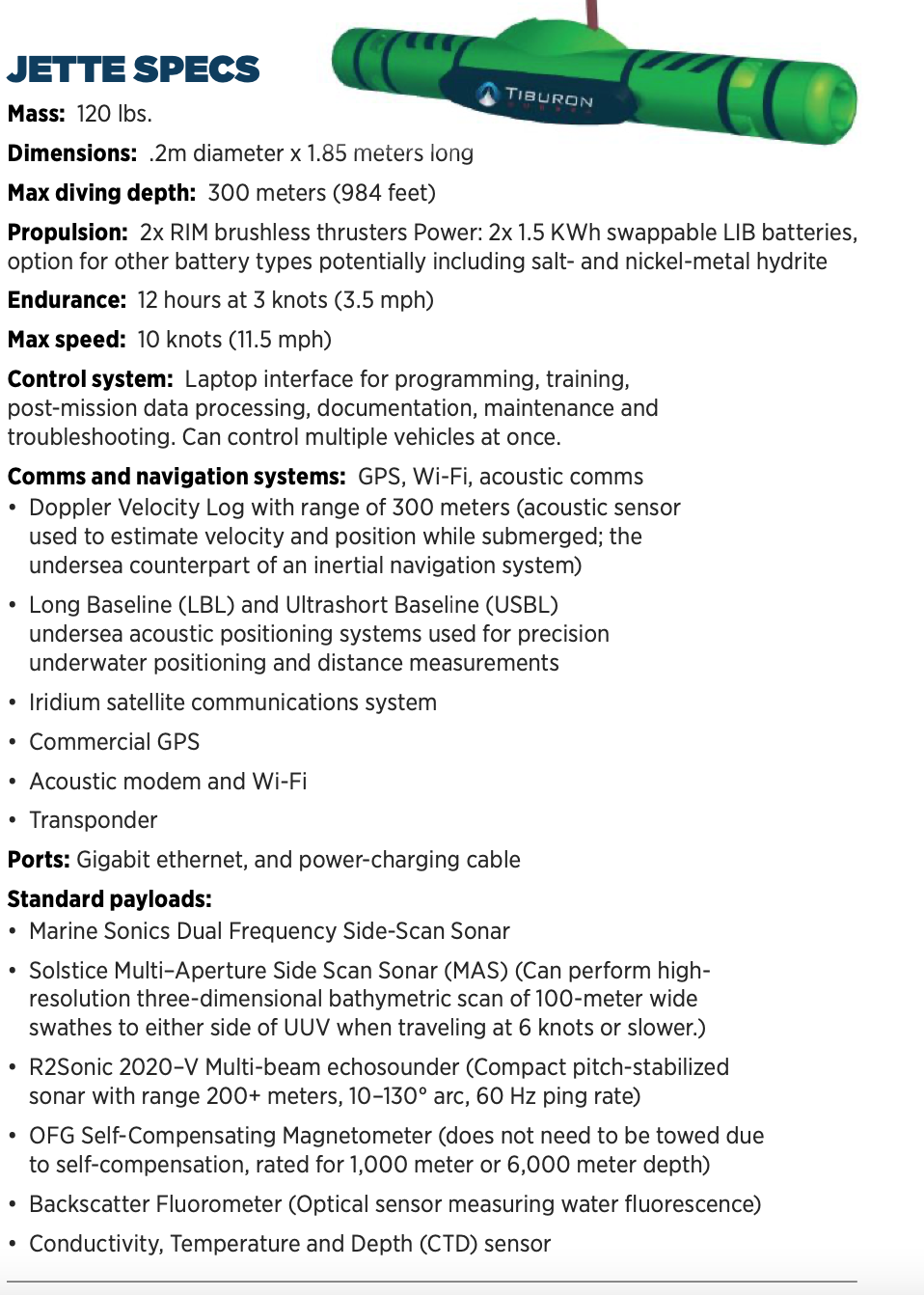
Two years earlier, Taylor sketched on a napkin at a café on New York City’s Upper East Side his concept for this vehicle. Rounds of funding, a computer animated demo, CAD design files, and the efforts of 38 experienced underwater engineers and designers later, Tiburon produced something resembling a 120-pound, 8-inch diameter neon-green torpedo with a hollowed-out nose, with a conning-tower like protrusion in the middle. Now realized in the flesh, or rather a mix of aluminum and 3D-printed polymer resin, the sleek new JETTE thruster equipped robot is undergoing advance testing. Not only is it designed to perform its mission without human direction, but it’s a rarer hovering autonomous underwater vehicle (HAUV) that can maneuver laterally or hover in place like an undersea helicopter. Compared to the handful of existing HAUVs leveraging as many as six to eight thrusters, the JETTE design uses only two specially designed RIM thruster control assemblies yet can cruise considerably faster with little to no cavitation.
Even back in 2017, as we geeked out over World War II submarines, Taylor conveyed his desire that his legacy go beyond preservation of the historical past, but also toward a better, healthier future for the ocean and planet.
“As much as I’m finding historical wrecks,” he once said, “My main goal is to create direct access to underwater data. We need real-time data on fisheries, renewable energy, climate remediation, infrastructure security, and methane leaks to name a few. We need to measure biodiversity in real time. We’re going to either crash and burn, or we’re going to learn how to live in harmony with the world, and real time data is part of the way we’ll do that. In science today we’re often working with data that’s published 5-6 years later. Exxon gave money to study the Gulf of Mexico oil spill in 2010, but the scientist recipients were not allowed to publish the findings for 10 years. We need to have access to that data in real time and autonomous robotic technologies are a key tool we need for a sustainable future.”
THE DILEMMA OF UNDERSEA EXCLUSIVITY
Water covers 71% of the Earth’s surface—but our awareness of what’s happening beneath the waves lingers far behind our mastery of the surface domain, thanks to the combined efforts of satellites, unmanned aerial systems and centuries of geological surveys.
Human means for undersea exploration, inspection and surveillance have heretofore been expensive, exclusive and tied to a short leash, often literally: manned submarines or remotely operated vehicles (ROVs) tethered to a mothership, a spectacle familiar to admirers of Jacques Cousteau’s oeuvre and its successors. Most of these expensive underwater vehicles are costly to operate, requiring large teams and specially designed or mobilized ships, or in the case of manned submersibles, they’re built in single-digit production runs and require non-standardized training and support. Those able to afford them can expect long lead times averaging 14 months in advance of deployment.
But Taylor believes a combination of technologies is poised to transform the maritime ISR space, making it more accessible than ever before to a wider range of private and public interest actors, and not just hydrocarbon giants and elite research teams.
His vision for making that future a reality involves building a rental/lease fleet using his patent pending thruster system incorporated into a new robust survey robot, and establishing a globally distributed service model that could make AUV surveying a viable, low-logistics option with fewer steep barriers to access. He sees future access to ocean data being built on the backbone of autonomous robotics powered by sophisticated algorithms, AI and machine learning.
More conventional underwater vehicles rely on gimbled thrusters and maneuvering surfaces (fins) on just the stern. This is inherently unstable at the bow, as underwater drag tugs the vehicle to a perpendicular angle. Such UUVs also must move forward at a minimum speed—usually 1-2 knots—to maintain the necessary water flow over stern control surfaces to maintain bearing (horizontal) and attitude (vertical pitch.)
JETTE PROPULSION, SUBMARINE-STYLE
Tiburon’s patented RIM thruster control gives JETTE its helicopter-like 5 degrees of maneuverability and underwater hovering capability. Their special trick? There’s a thruster on both JETTE’s stern and bow.
But JETTE’s bow thruster helps counteract instability and drag to such a degree that the vehicle can maintain station—hovering in place at zero knots or turning on its own axis.
This hovering mode is obviously valuable when undertaking a lengthy inspection of a stationary object. But it also enables very precise maneuvers that facilitate non-damaging docking with an inductive underwater recharging station. Think of a wireless recharging station for smart phones, but for drones, removing the need to devote expensive hours at sea recovering the vehicle and recharging or swapping new batteries.
“We envision these things living under the ocean for 6 months at a time or more on windfarms, doing their security sweep, coming back, docking, charging and uploading their data for analysis,” Taylor said. “Then charging back up and going out another search area.”
JETTE also has a more speed-oriented survey mode in which the bow and stern thrusters operate in opposite directions at the same speed in RPM. This results in forward thrust, which can be precisely tweaked by increasing/decreasing rotations per minute. Differential use of the thrusters in this mode allows tight turns with a radius no wider than the length of the vehicle.
Survey mode is also effective for surface transit because the bow thruster can push the vehicle’s nose toward the surface. By contrast, most UUVs struggle due to near neutral buoyancy optimized for underwater transit, and thus are at high risk of damage during launch and recovery cycles. Waves or wake from the recovering ships often push UUVs underwater, which can interrupt wireless control links used for docking.
Taylor added, “The dual thrusters allow a much higher speed than most AUVs out there when you’re trying to maneuver in tandem with ship or submarine or any other UUV. You can move sideways in an instant, up or down; that’s extremely important in the future as autonomous swarm technology [large numbers of unmanned vehicles operating in concert] proliferates.”

JETTE’s lack of protruding diving plains, thrusters and maneuvering fins is also an advantage because they are particularly prone to impact damage or environmental fouling. Damage to such protuberances during surveys or launch and recovery accounts for the most costly damage to UUVs.
Lastly, there is a self-rescue mode designed to ensure recovery of the AUV should there be loss of control or other problems. For example, should the HAUV’s forward rim thrusters become damaged by underwater organic material, the stern thruster will take over the task of surfacing the HAUV and transiting it toward a pre-arranged recovery waypoint.
THE NAVAL ANGLE
Taylor said the RIM thruster control assemblies by themselves are proving quicker and less expensive to bring to market than a fully equipped HAUV. “Two or three different commercial and defense companies right now are building their own large vehicles and are looking for maneuverable thruster solutions. Our thruster is a very affordable, patented solution scalable for both micro and large UUVs.”
Indeed, by early 2024 the thruster had piqued the interest of the U.S. Navy as military UUVs large and small alike flourish globally in mine-countermeasure and ISR roles. After all, JETTE’s small size means it can fit inside even lightweight torpedo tubes and could improve torpedo tube launch and recovery success by 40%.
Tiburon Subsea has particularly attracted the interest of the Office of Naval Research and the submarine division regarding possible R&D funding to mature its JETTE thruster technologies, potentially for their integration with Navy systems, upward scaling, and reduction of acoustic signature. This would not only improve stealth, but also enhance the resolution of acoustic sensors.
“There’s a big calling now in undersea warfare and security,” Taylor said. “Undersea infrastructure needs to be monitored, whether for static sabotage, planting something to blow up at a later date, or disrupting communication lines. Such tampering is not there one day and can pop up the next. So you’d need to run regular missions with AUVs, and use machine-learning AI to scan the resulting data and recognize signs of tampering and investigate it.”
Undersea sabotage is hardly a hypothetical threat. On October 7, 2023, Scandinavian and Baltic pipelines and undersea cables suffered near simultaneous, deliberate damage—apparently sabotage conducted by the Russian cargo ship Sevmorput or the accompanying Chinese vessel New Polar Bear. Russia had threatened such sabotage in retaliation for the still mysterious destruction of the Nordstream 2 pipeline in 2022.
WHAT DOES IT TAKE TO BUILD AN UNDERSEA ROBOT FACTORY?
How does one transition from operating underwater robots to designing and building them? Not easily, but Taylor’s credentials, and connections to the UUV industry and user community have helped him find the necessary funding and expertise, including support from one of the world’s largest terrestrial windfarms.
Their key partner is marine biologist Earle, renowned for her work on the environmental impact to marine life, including the oil spills resulting from the 1991 Persian Gulf War. The first female chief scientist of the National Oceanic and Atmospheric Administration (NOAA), Earle has been anointed “Explorer at Large” by the National Geographic Society and “Hero of the Planet” by TIME magazine. Taylor’s collaboration and friendship dates back 30 years, to when they worked together on the Deepworker submarine on National Geographic’s multi-year Sustainable Seas Expedition.
Earle’s company Deep Ocean Exploration and Research (DOER Marine), founded in 1992 and based in a hangar at Naval Air Station Alameda, has already built several submersibles and remotely operated vehicles, and helped launch Google Earth’s oceanic underwater map module.
Taylor now has a team of 38 engineers and designers working on JETTE, supported by his 3D printing and additive manufacturing lab in Alameda. Tiburon Subsea also has offices in New York City, Alameda, Calif., Charlottesville, Va., and continues to grow.
Taylor said in February that unlike prior ad hoc field modifications done to ROVs, their HAUV design needed to be balanced for operational payloads from the outset. “Everything needs to fit in its proper place and weight-distributed so that it’s slightly positive. Since we’re dealing with so many third-party payloads, we had to aggregate their system specs for modeling and testing—pretty much a 9-month project. Now that it’s done, we’re ready to incorporate the JETTE thruster control assembly into our fully designed vehicle.”
Tiburon’s partnership with DOER has seen the JETTE vehicle evolve from an idea to the tangible maneuvering testbed that splashed into the water this May. The tank tests are used to conduct flow simulation studies to determine drag coefficients, as well as study JETTE’s maneuverability and acceleration. This data will help fine-tune how the autonomy algorithm maintains stability and uses its thrusters at maximum efficiency. Open water testing is currently scheduled for this fall, Taylor said.
However, Tiburon is now gathering seed money to fund Phase 3, which will realize further R&D of a production line at Alameda that will build operationally capable JETTE thrusters and vehicles. This next stage will include numerous other tasks: developing autonomy algorithms and user interface, acquiring and testing new 3D-printer materials, optimizing parameters ranging from weight to acoustic and magnetic signatures, and fine-tuning power management, sensors, navigation and communication systems.
Taylor is also considering various options for JETTE’s software. “We have several companies interested in supplying operating software to us. But we’d like to eventually build our own operating systems, because as AUVs evolve, their software has to evolve with them.” An in-house solution could allow much faster evolution of the software to meet customer demands.
For now, he’s focusing on operating interface networks, and is leveraging open-source Robot Operating Systems to facilitate hardware and payload research, though he adds that AI and machine-learning will eventually enhance the vehicle and its payloads.
DEMOCRATIZING THE BLUE ECONOMY?
Taylor’s vision is to expand his HAUV fleet and pre-position them at sites across the globe, allowing rapid in-region deployment within three days in response to client requests. The equipment will effectively have been certified in advance for overseas travel removing a major source of delays in deploying AUVs abroad.
He believes a low logistics service model (“two guys and a laptop”) is best suited to making AUVs available to a wide range of scientific, commercial and government actors, sparing them having to buy an entire vehicle outright, pay for its sustainment over many years, and train personnel to use them on their own dime. And by retaining ownership of the HAUVs, Tiburon could continually upgrade the HAUV’s software and mission payloads, and make sure pilots stay up to date. “A big risk is that tech changes so fast, a fixed platform becomes outdated. By corralling them together, we can keep them up to date as new payloads come along.”
Taylor still has hurdles to jump to realize this ambitious vision to use JETTE technology to transform undersea surveying, but he is driven to do it by far more than just the business case.
“Data is the key. Underwater resources need to be studied and understood and mapped, and if we can’t make this data collection technology readily available, it’s a sin in my book,” Taylor once said. “It can answer questions about our oceans helping to protect and foster a Blue Economy and a healthy ecosystem. We need to democratize access to this tech.”