Unmanned aircraft belong in the air, and unmanned underwater vehicles belong beneath the waves. There’s no way to be good at both domains. That’s just common sense.
Or is it?
In recent years, a number of groups have begun researching and building vehicles that can smoothly transition from water to air and back again.
Among these new platforms are the Naviator, a multicopter unmanned aircraft system (UAS) from Rutgers School of Engineering, a quadrotor called CRACUNS built by Johns Hopkins University Applied Physics Laboratory, and the Loon Copter, built by Oakland (Michigan) University’s Embedded Systems Research Laboratory. The latter won the $1 million grand prize at the recent UAE Drones for Good Award.
All three (though this is not an exhaustive list) have great potential in a variety of applications: search and rescue, inspections, environmental monitoring and more.
Tracking Underwater Mines
Javier Diez, an associate professor of mechanical and aerospace engineering at Rutgers, has been dabbling with multi-medium drones since an undergraduate floated the idea about four years ago. That student initially proposed building an unmanned aircraft system with an inflatable artificial “air bladder” that could pop the device back up to the surface after it descended for an underwater mission.
While that idea proved unviable, it led to the development of Naviator, a project now partially funded by the Office of Naval Research. A four-armed octocopter, the platform uses sophisticated software to control each of its propellers independently, which allows for quickly dropping in and out of the water.
“When the top [propeller] reaches the surface, the software will say, ‘Hey, you reached the surface, stop operating,’” Diez told Inside Unmanned Systems. “The bottom one is still operating because it’s underwater. Then the top [propeller] comes out of the water and the software says start running in air mode.”
The machine is “quasi-neutrally buoyant,” Diez told a crowd at the 2016 XPONENTIAL conference in New Orleans. “You can actually do a lot more operations underwater if you are neutrally buoyant; you can spin on all your axes.”
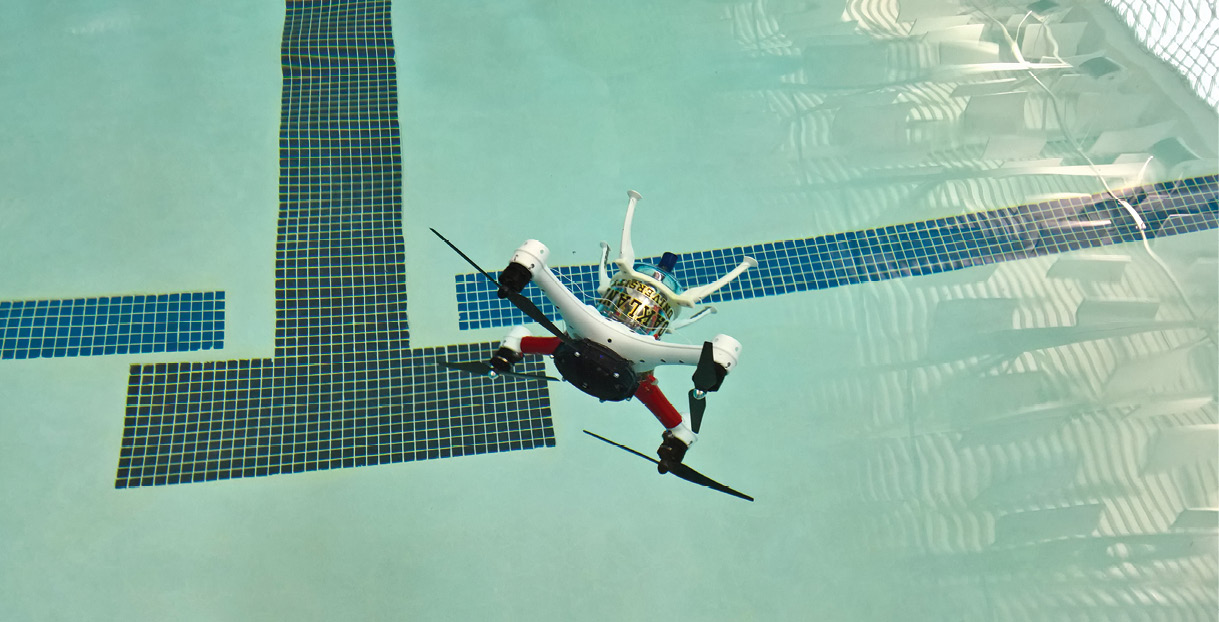
The prototype Naviator is small, but Diez says the device can be scaled down to micro-scale and up to nearly helicopter size. He told the XPONENTIAL crowd that, counterintuitively, large propellers seem to work better underwater than smaller ones.
The Naviator has not been tested in a body of water larger than a swimming pool, but Diez is confident the prototype will withstand scrutiny. It’s being demonstrated in open water in late June, and then Rutgers engineers will continue to refine the prototypes. Even in choppy water, “we think we have the best method for [air-water] transition,” Diez said.
The ONR funded the research after seeing its potential for seeking out mines.
“You should be able to deploy from some distance, reach your destination and explore. One mine can stop a fleet,” Diez said.
Release the CRACUNS
Johns Hopkins University Applied Physics Lab (APL) recently revealed its water-to-air drone, the Corrosion Resistant Aerial Covert Unmanned Nautical System, or CRACUNS.
Built in just four months, the prototype is a submersible UAS that can be launched from a fixed position underwater. This enables the UAS to effectively operate both in the water and in the air.
Tom Murdock, project lead for CRACUNS, told Inside Unmanned Systems the project was meant to demonstrate that they could make a customized unmanned vehicle in a short amount of time. “Instead of buying a commercial vehicle and trying to adapt it to a mission, tell us what the mission is and the payload you need to fly and we’ll create a vehicle to suit.”
The CRACUNS is designed to remain deeply submerged for long periods of time. Vehicles could be hidden away underwater until needed, then, at a predetermined signal, launched to perform their mission. Murdock says the signal could be transmitted either by radio, in which case the vehicle would be tethered to a small buoy, or by acoustic signaling. After that, a CRACUNS is autonomous—it would deploy and carry out whatever instructions had been pre-loaded into it.

The team tested CRACUNS by submerging it in salt water. Two months later, they hauled it up and found the vehicle still perfectly operational.
The CRACUNS team also developed a series of mini CRACUNS, a vehicle half the size of the original that can be folded into a 12-inch round tube and launched from an unmanned underwater vehicle (UUV).
“It carries fewer batteries and still gives us the same amount of performance, which is huge,” said APL mechanical engineer Richard Hooks.
A Winning Idea
Researchers at Oakland (Michigan) University’s Embedded Systems Research Laboratory also believe in the power of amphibious drones.
Their offering, the Loon Copter, is based on a DJI Phantom 3, but has a larger bottom barrel that fills with ballast water. Once it sinks (only to a few meters for now), it turns 90 degrees and moves through the water. By ejecting its ballast water it can rise back to the surface and either skim along the surface—while holding sensors under water if desired—or take off back into the air.
Like the Naviator and CRACUNS teams, Loon Copter’s makers see potential for search and rescue, environmental monitoring and inspections.
The team won the International category in the UAE Drones for Good Award and $1 million USD to further develop the prototype.
While the above three vehicles are roughly based on the same template—that of a multirotor VTOL vehicle—they’re not the only amphibious vehicles around.

The Biorobotics Lab (BioRob) at the Swiss Federal Institute of Technology in Lausanne has, for years, been building amphibious robots that crawl like salamanders.
The BioRob’s focus is on using these devices to study how real animals move, lab postdoc Behzad Bayat told Inside Unmanned Systems. But the technology also could pave the way toward service robots able to perform inspections or search-and-rescue missions, especially in narrow, confined spaces.
Salamandra Robotica II and its “sibling” robots Amphibot and BoxyBot are modular, with usually up to 10 body segments each 5 inches long and 3 inches wide, controlled by one “head” module. If it loses a segment, just like a real salamander, it can recover (and like a real salamander, the tail flails around eerily for a minute or two).
In the water, the robots behave like eels, which also has a practical purpose. Some eels, Bayat explains, can migrate 3,700 miles to spawn without eating anything on the way. “They go very slowly, but [with] a lot of energy conservation, they can still manage to do that,” Bayat said. “[Our] robot is very much constrained by the battery. We have to use as little energy as possible but still manage to cover as much area as possible.”

Dunk Resistant
Finally, an idea that deserves honorable mention in the category of amphibious drones is neither amphibious or a drone. But, Indiana-based DroneRafts’s first product, the WaterStrider, is designed to make using drones around water much easier and safer.
WaterStrider is a snap-on set of lightweight (about a half-pound) pods for the Phantom 3 and 4 UAS that make the vehicles look a little like those water strider bugs that can glide across the surface of a lake.
The pod feet mean pilots can better avoid dunking their Phantom in a lake while trying to get that perfect shot. (It also makes it easier to land on rocky terrain.)
DroneRafts launched WaterStrider on Kickstarter April 22 and met its $22,500 funding goal by May 28.
A Unique Combination
The potential for water-to-air-to-water drones is enormous. Though many platforms remain untested outside the laboratory, with so many possible uses, it’s not surprising that a number of teams are working to develop these concepts.
“I think in people’s minds, air and water was not compatible,” said Rutgers’ Diez, adding that a NASA scientist couldn’t believe the Naviator could perform until seeing it with his own eyes. “I think our accomplishment was to break that barrier.”