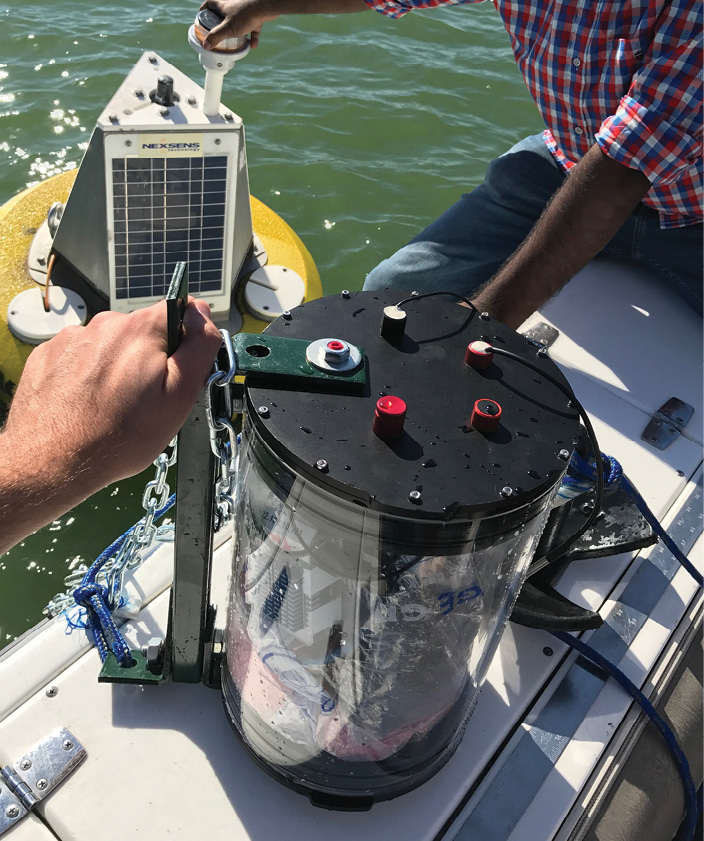
An underwater modem. Photo courtesy George Sklivinitis
Increasingly, robots not only soar through the air and wander over the land, but they also swim on and under the water. Now scientists in Florida are developing a wireless communications network to connect marine robots together in real time, whether they are on the water’s surface, flying in the sky or lurking underwater.
Nowadays, unmanned aerial aircraft systems (UAS) and those operating on land regularly communicate using radio waves from satellites, cell towers and WiFi. However, radio waves generally can’t penetrate deeply through water. This means a lot of the things easily done when operating drones and unmanned ground systems, such as controlling them remotely or using GPS for navigation, are far more difficult with underwater systems.
Instead of relying on radio waves, sound waves are the preferred signals for subsurface communications over distances greater than 100 meters.
“Sound propagates as a pressure wave with speeds in the water that range from 1,450 to 1,498 meters per second,” or about 3,240 to 3,350 miles per hour, said George Sklivanitis, a research assistant professor of computer and electrical engineering and computer science at Florida Atlantic University in Boca Raton. In the water, “sound can easily travel over kilometers, or even hundreds of kilometers.”
Marine Modems
To help develop new and improved underwater acoustic networks, scientists at Florida Atlantic University received a $500,000 grant from the National Science Foundation. The aim of the four-year project is to design, deploy and evaluate a test bed for subsurface marine modems to connect autonomous undersea vehicles (AUVs), autonomous water-surface vehicles (ASVs), UAS and satellites.
“Imagine you have an underwater asset, like a submarine vehicle or a diver, and you want to communicate with another underwater asset,” said Dimitris Pados, co-principal investigator of the project and a professor of computer and electrical engineering and computer science at Florida Atlantic University. “You can envision a network where you can get information acoustically from the bottom of the water to another asset on the surface of the water, like a buoy, and it can communicate with radio-frequency signals across the air fast, can go to a satellite even. So you could communicate from one point on the bottom of the sea to another all the way on the other side of the Earth in almost real-time.”
Ideally, underwater acoustic networks could serve as communications and positioning systems to control underwater vehicles “for search and rescue, remote wireless navigation and surveillance operations,” Sklivanitis said.
Divers could also use these networks to interact with underwater assets, Sklivanitis said. “Underwater vehicles can act as virtual diver assistants and provide a range of services, such as diver monitoring, guiding, navigation and diver tracking,” he said.
Furthermore, military uses of such networks could include “remote wireless control of underwater vehicles and drones for surveillance, mine, ship, intruder or object detection,” Sklivanitis added. A host of applications for these networks may also exist for the offshore petroleum industry, seaport monitoring, commercial fisheries, pollution monitoring, oceanographic research and wildlife monitoring, he said.
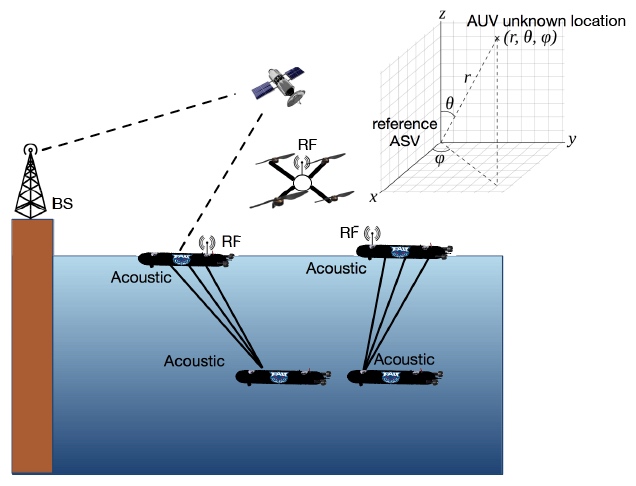
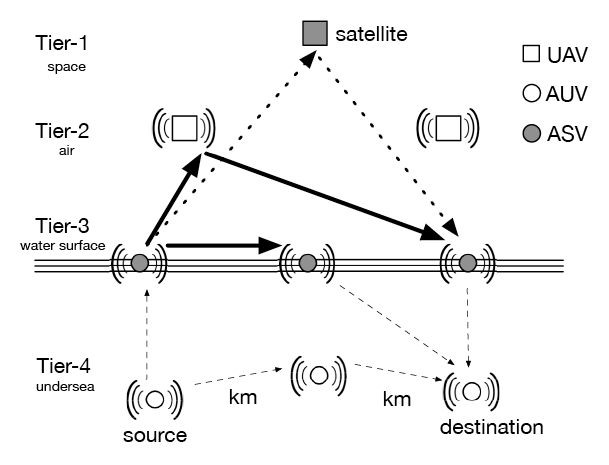
A diagram of a network connecting assets underwater, on the water’s surface, in the air, and in space.
Challenges
However, to cover long distances underwater, lower frequencies of sound are needed. These can transmit far less data than the frequencies used for terrestrial radio communications, Sklivanitis said.
In addition, underwater acoustic communications links can suffer from a variety of other problems that hamper data transmission. For example, acoustic emitters and receivers are vulnerable to drifting with the waves, and the speed at which sound travels through water can vary with temperature, salinity and depth, all of which complicate the analysis of acoustic signals. Moreover, underwater acoustic waves are susceptible to scattering due to reflection off the surface of the water, the bottom of the sea and objects suspended in the ocean.
Given all these constraints, underwater acoustic channels have limited bandwidth open to them. Furthermore, they currently experience heavy traffic from both artificial acoustic systems such as sonar as well as natural acoustic systems such as echolocating dolphins and whales.
Cognitive Networks
One strategy to make the most of that limited bandwidth comes from technology known as cognitive radio. Cognitive radios are programmed to automatically detect available radio channels and negotiate with other cognitive radios to set their transmission and reception settings to make the most of the wireless spectrum and avoid interference, Pados said.
“Cognitive networking is new even for aerial communications, but the most critical application of cognitive networking may be underwater, because the problem of creating effective links and networks is so much more difficult underwater than aerially,” Pados said.
The researchers hope to develop new cognitive underwater acoustic modems that can adapt to maximize all the available wireless bandwidth. The aim is to introduce “the next-generation underwater network architecture of the future, where throughput optimization is carried out across space, air, water-surface and undersea mediums for the first time,” Sklivanitis said.
The researchers also plan to design new algorithms that are better at pinpointing 3-D locations underwater.
“Imagine dropping a bunch of wireless communications nodes into the water. To initialize a network, you have to have a sense of the 3-D location of each node so you can connect them and create information sessions between them,” Pados said.
Specifically, the scientists aim to develop new algorithms focused on estimating the correct angles of arrival of underwater signals. Conventional methods of doing so are highly vulnerable to errors creeping in due to irregular outliers in sensor data. These kinds of errors can crop up, for instance, when oceans scatter and reflect acoustic waves, Sklivanitis said. The researchers are developing a new strategy to computationally avoid getting confused by such outliers, he explained.
“This project aims to significantly advance—five-fold in precision—the state of the art in 3-D, passive undersea acoustic localization,” Sklivanitis said.
In addition, the new system will employ a software-defined radio platform, where tasks traditionally implemented using hardware such as amplifiers, filters and mixers are instead executed using software. This shift to components that are easily reconfigurable can help scientists rapidly test and deploy communications and networking techniques, Sklivanitis said.
The scientists will also aim to reduce the impact of their underwater acoustic networks on marine life by minimizing sound power levels and designing acoustic signals proven to reduce biological discomfort, Sklivanitis said. “We believe that the proposed software-defined modem technology offers a way forward to more bio-friendly acoustic modem devices for operation in regions with sensitive fauna or increasingly strict environmental controls,” he noted.
Experimenting
The scientists will first analyze the range, accuracy and transmission rates enabled by their strategy in a 30-foot-deep water tank at Florida Atlantic University. They will next perform experiments in the Atlantic Ocean off the coast of Dania Beach at the university’s Institute for Ocean and Systems Engineering.
The research team’s experiments will start by testing how well their techniques can pinpoint and track the location of marine robots. They will begin with speakerphone arrays placed at various locations in the water, and then move to speakerphone arrays loaded onto autonomous underwater vehicles, Pados said.
In their experiments so far with underwater acoustic modems, “we were able to get about 300,000 bits per second over distances of a quarter of a mile,” Pados said. “In comparison, right now, commercial systems used by the navy have data rates that are as low as 10,000 or 20,000 bits per second—which are like the data rates we had with dialup modems in the mid-90s, which you could do little with except send email. If we can go up to 300,000, that’s enough to stream maybe a small-size video.”




