
To the hearts and minds of many observers, the real promise of autonomous vehicles has been freedom on the Great American Highway, the Autobahn or any of the world’s great motorways, hands free and eyes on the horizon. It means safe and efficient cross-country freight transport, emancipating those hard-laboring truck drivers who, heaven knows, deserve a rest. Or zipping through crosstown traffic in a rolling living room, only vaguely aware of occasional bottlenecks as you watch your favorite show, take a quick nap or even get some work done.
We’re not there yet, and the path to that kind of unbounded autonomy is still long. But that doesn’t make it a pipe dream. Paul Perrone, founder and CEO of Perrone Robotics, believes the promise of the open road will be fulfilled. His Crozet, Virginia-based company is using vehicle-agnostic retrofit kits to put fully roadworthy autonomous systems into operation today, in pilot projects and for profit. So far, they’re operating in circumscribed zones, preparing for the bigger stage to come.
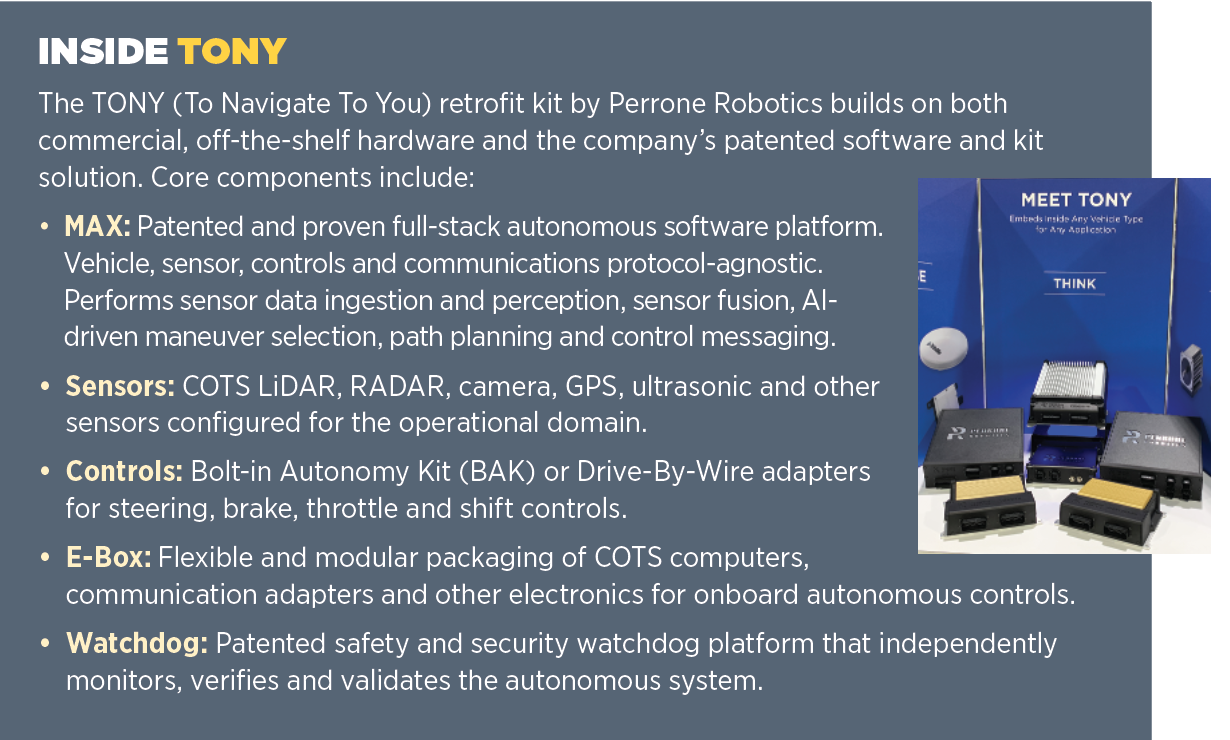
“We’ve equipped over 30 different types of vehicles with our TONY [To Navigate to You] retrofit kit,” Perrone said. “We take our general-purpose software platform that we call MAX, configure it for whatever the sensor arrangement is on a particular vehicle—LiDAR, radar, we’re agnostic as to the make and models of those as well. Our onboard computer platforms are packaged in equipment boxes, and these, with the sensors, GPS, inertial navigation, camera and also how we take over the steering, brake and throttle of the vehicles—all of that together is our TONY kit. We can retrofit pretty much any vehicle—legacy or brand new, gas or electric.
“With regard to the general automotive thing,” he continued, “we’ve designed for that in many ways. We have tested full-size, full-speed vehicles at 55 miles an hour on public roads. We did it in the UK with Jaguar Land Rover, and we did it in the U.S. with the same vehicles. But what we’ve said is that to get revenue now we can address applications that run a little bit slower in geofenced environments.”
He explained that a lot of the so-called “exception scenarios” commonly cited as challenging in open-road environments, such as encountering a vehicle driving on the wrong way or on a sidewalk or running a red light, also come up in controlled environments—just at slower speeds. “We’re designing for the most demanding case,” said Perrone, “but we’re applying it to locations where we can go autonomous now.”

THE FORT CARSON EXPERIENCE
A case in point is a project that ran at Fort Carson, the U.S. Army post located near the city of Colorado Springs. The facility has hosted multiple future-looking research and development initiatives, involving, for example, the installation of microgrids, clean energy systems and smart transportation.
Starting in July 2020, Perrone Robotics, partnering with First Transit and the U.S. Army Engineer Research and Development Center (ERDC), operated two Polaris GEM e6 automated shuttles under the ERDC Smart Transportation Testbed program. The R&D included planning, developing, demonstrating and employing automated vehicle technologies, with the goal of showing how these advances can help the military reduce transportation costs, improve public safety and enable faster delivery of services.
Perrone Robotics had previously identified Polaris GEM vehicles as a good option for its autonomy refit. Perrone’s kits are easy to integrate on all GEM models, including the successful GEM e6 and GEM eL XD. These vehicles are street legal and there are already tens of thousands of them working in the urban mobility space. The GEM e6, an all-electric vehicle, can carry up to six people at a top speed of 25 miles per hour, and, as fitted out by Perrone Robotics at Level 5 autonomy capability, can perform all driving functions autonomously under all conditions.
“The application was about getting base personnel from point A to point B,” Perrone said, “where otherwise they would have to walk or take existing transit services. It was very much like any sort of residential community or college campus, but in this case it was a military base.”
Perrone Robotics has a history of working with ERDC, noted John Anderson, a senior researcher at ERDC’s Geospatial Research Lab (GRL), which is one of seven ERDC research facilities. Part of ERDC’s work, Anderson explained, involves “integrating different visual-based technologies to various robotics systems to study the navigation solutions that can be derived to accurately estimate pose and permit a vehicle to travel by ‘“seeing and sensing” its environment, much like humans do.
“We initially worked with PRI in 2018,” Anderson said, “as a subcontractor on a SBIR [Small Business Innovation Research] Phase II and Phase III to integrate a frequency-modulated, continuous wave LiDAR into an autonomous and semi-autonomous navigation system. As part of the ERDC, GRL’s primary responsibility is enabling Army and Engineer Modernization through the research and development of various mapping and navigation technologies. The Perrone Robotics system offers a way to do this in a simple yet effective framework. We are keenly interested in the ‘drop-in’ capabilities Perrone Robotics offers as a way to create an autonomous system when necessary that can operate using our visual technology.”

ONWARD WITH ERDC
Since the successful completion of the Fort Carson shuttle project, Perrone Robotics has become involved in a new phase of work with ERDC. “We’ve now started working with their Polaris Ranger platform,” said Perrone, “which is an off-road vehicle that we’re outfitting with the latest incarnation of our kit, and with a richer, more robust suite of sensors. This will enable operations in a wide variety of conditions; GPS-compromised and in some cases completely denied environments.”
For Perrone, maximum robustness means, among other things, the best combination of sensors in an optimized physical configuration. “We have redundant LiDAR and radar,” he said, “with overlapping LiDAR coverage for the front. We have a 360-degree view around the vehicle, but with diverse redundancy of sensing technologies, especially when you’re looking forward and down lanes where you have to merge, where you have to look far. And then we have redundancy of algorithms. No one algorithm is the right thing in all cases: when you’re trying to figure out where you are, GPS might work in some cases, but it might degrade, so you might have dead reckoning, or looking at lane-keeping or SLAM [simultaneous localization and mapping]. Safety is critical; our solutions are verifiable and validatable; we’re able to safety-certify our technology.”
FROM PILOT PROJECT TO OPEN ROAD
Many of the geofenced applications are larger than people think, Perrone said. “We may have a deployment with a logistics company where they have 10 vehicles at a location, but they may have 150 locations, so that’s 1,500 vehicles, so we get to scale that way. Same thing with, say, a large city transportation authority, where they might want 100 shuttles, but what we can do there exactly applies to 100 other sites across the world. We’ve got an opportunity in Germany where they’re going to want up to 10 shuttles, while in the immediate vicinity there are five other similar locations. It’s cookie cutting across different sites, but there are opportunities to do hundreds and eventually thousands of vehicles with these geofenced applications.”
Perrone described his company as “product-obsessed: “Our goals are to create a system that’s NASA-grade safe, Apple-simple and reliable, and provide Amazon-level customer service. We need all of those elements for our customers to feel comfortable rolling out these vehicles at scale.
“We’re looking at, ‘How do we get to fleets?’ Otherwise, everything’s a pilot, and what’s the use of that? We can have pilots until the cows come home. We don’t think the path to autonomy is to use vehicles that will never operate on public roads. With our vehicle-agnostic approach, if a customer has a legacy fleet, they’re not going to want to buy these super-expensive, as-built autonomous vehicles. They’re going to want to take their legacy fleets, especially in the military and the DOD, and retrofit and upgrade them for autonomy. When they do that they’re going to save money, and that’s a path to acceptance, to provide something that’s economical and not a science project.”
TO MARKET, FROM INNOVATION
Intel Capital invested in Perrone Robotics in 2016, and, “that kind of drove a little bit of a focus in the automotive world,” Perrone said. “We’ve worked with Jaguar Land Rover, Denso and Wind River. At some point we realized the path to open-road autonomy is still a long way out there, and not just because the auto companies have a five-year-or-so program from the moment they say something till the time it goes into a line of vehicles. So we said, ‘We can go autonomous now, on campuses and in resorts, in downtown business districts with circulator routes and in logistics yards, and we set out to prove it. Meanwhile, we had our first fully autonomous Level 5 operational on public roads at the beginning of 2019, where there wasn’t a single intervention during a three-month pilot.”
What the company is doing seems to be working. “We have a Fortune 100 logistics company where we’re doing autonomous vehicles at distribution centers,” Perrone said, “and we’re working with the Jacksonville Transportation Authority. We’ve signed an OEM agreement with Local Motors, with the myriad of applications that they’re bringing to the table, so all this is coming together and the demand is welling up. There’s been a little bit of a retraction because some companies that maybe came out too fast ‘scorched the earth’ before us, so we have more to prove. But we can prove it pretty fast.”
LEADING THE WAY
Longevity and experience are part of what makes Perrone Robotics better than competitors. “We’re not newcomers,” Perrone said. “We’ve been doing this for 18 years. It was research in the early days. We were in the DARPA Grand Challenge [2005], in urban challenges and events like that, and with that history and working with a wide variety of companies we’re able get a holistic view of the true needs of autonomy, and bring it into our kit.
“We have created a truly general-purpose robotics operating system, our vision from Day One, a solution that can work across any application and domain very rapidly. With that has come simplification. For some of our competitors, it takes weeks if not months just to map an area. For us, we show up, we drive a course once—we call it ‘map mission and go’—and then we’re able to run autonomously. And our simpler systems can run on electric vehicles without sucking the life out of the battery. Our customers love that they can create new maps of the environment and then go out and operate the vehicle. They don’t want to have to rely on an autonomous vehicle company, operating on its own hours and on its own terms, to give them a map when they’re ready.”
SPEED SELLS
One of the things that sets Perrone Robotics apart is the speed at which their retrofit vehicles move. “We’re able to run at speeds of 25, 35, 45 miles an hour,” Perrone said, “versus a lot of folks in the shuttle space who are operating at speeds of 7 to 10 miles an hour, so we’re able to offer full, robust autonomy out of the gate. A lot of it boils down to the ability to detect obstacles out there. You can send a vehicle autonomously and at speed without any sensors, but if it collides with something, that’s not good. What you really need is the ability to robustly and reliably detect things that are out in front of the vehicle and crossing its path at speed. That’s the sensors you use and how you arrange them. We’ve thought a lot about that, so we have solutions for how to place sensors, and then it comes down to the algorithms inside, and being able to deal with changes in the sensing technology.
“To get to wider highway-based autonomy,” Perrone added, “you do need sensors that can see out farther, and those sensors which have been historically expensive have to be less expensive. There are also things like traffic signals. That’s one thing that, in a controlled environment, we’re able to manage, versus encountering different traffic lights across the U.S. Maybe there will be some infrastructure changes, maybe DSRC [dedicated short-range communications] won’t be eliminated, maybe C-V2X [cellular vehicle-to-everything] will really take off, and there are other constituent technologies. The U.S. isn’t quite ready, but we’re ready, and we can deploy and try out those technologies in safer environments now.”
From the outset, Perrone said, he knew sensor technology was going to evolve. “That’s why we’re having a sensor-agnostic approach. We don’t want to write new code when we integrate a new sensor. We want to solve the problem once, so we can then just reconfigure the software that we have for a different situation, and then we’re up and running.
“Radar is changing slowly, camera technology is increasing resolution, LiDAR is changing, especially in terms of the cost,” Perrone said. “LiDAR units used to cost $150,000; now they’re $4,000 or $5,000. Recently, we’ve been able to get them for even less. We’re working now with vendors where we have much greater resolution, at a price point where we can replace a driver for the same cost or less than the cost of our virtual driver. That wasn’t the case four or five years ago.”
If you ask ERDC’s John Anderson, the evolution of sensor technologies is nowhere near its end. “Visual navigation will continue to mature,” he said, “to the extent that it will be an integrated solution in military and civilian vehicle systems alike, to permit position and navigation to be derived. Many aspects and visual navigation technologies are already finding their way into more advanced automotive systems.”
THE BOTTOM LINE
What it means is that business is booming. “It’s been an amazing year,” Perrone said. “We raised another round of capital in February [2021], and obviously that gave us booster rockets to bring ourselves to the next level.” The company has hired new people, at high and mid levels. “We’ve gotten organized across the board, so we can tackle some of the bigger things that we need to tackle, not just capturing the great sales opportunities which are coming our way but also forging new partnerships: the Local Motors OEM relationship, and we’ve got another OEM relationship with an EV company, and probably two or three more in the pipeline.”
The OEM agreements mean Perrone Robotics technology is now coming to customers straight from the factory. The company is also building new partnerships with sensor suppliers, and with companies that are helping to outfit vehicles at scale. “All of that we’ve been building up and pulling together,” Perrone said, “and we’re now getting to the point where we can support fleets of autonomous vehicles. Our customers are telling us that that’s where they want to be in 2022, so we need to make sure we’re able to supply that, across the board, support and everything. So business has been great. We’re realizing the dream.”




