
Hybrid drones that can convert from vertical take off and landing (VTOL) to fixed-wing flight are becoming increasingly popular for both military and civilian applications. However, controlling such designs can prove difficult because of how the aerodynamics of such aircraft change dramatically during flight. Now scientists are using artificial intelligence (AI) to help automatically design remote controls for any such hybrid drone.
Fixed-wing aircraft can be more efficient than their multi-rotor counterparts, giving them longer ranges, greater endurance and higher speeds for similar amounts of power. On the other hand, multi-rotor aircraft not only can hover and fly at low speed, but can also take off and land without runways or complex launch and recovery devices.
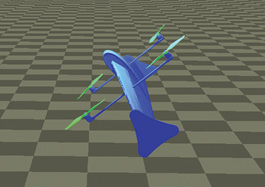
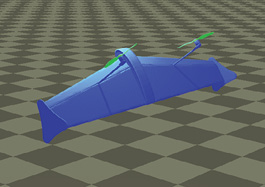
Hybrid aircraft capable of converting between fixed-wing and VTOL flight possess many of the advantages of both, making them potentially as useful for civilians—who can, say, fly them from a farm without needing a landing strip—as they are for the military, which can fly them from jungles, mountains, ship decks and urban battlefields with the same freedom. A wide variety of these convertible types exist, such as tilt-wings, where propeller-laden wings can rotate between vertical and horizontal positions, and tail-sitters, which take off and land on their tails, tilting horizontally for forward flight.
CONVERSION EVOLUTION
The U.S. military has researched convertible aircraft since the 1950s, but manned prototypes often suffered from mechanical complexity and other problems, such as how tilt-wings often stalled as they transitioned from one form of flight to the other, or how tail-sitters proved awkward for pilots to sit in during takeoff and landing. The advent of unmanned aerial vehicles (UAVs) has rekindled interest in hybrid aircraft, given how UAVs usually possess less mechanical complexity and payload constraints than manned vehicles of comparable size. Modern improvements in the efficiency of electrical motors and the increasing miniaturization of electronic components have also made hybrid craft more feasible than ever.
However, remotely controlling hybrid UAVs remains a challenge. Scientists typically have to develop controllers not just for copter and plane modes, but also for transitioning between these modes, when the aerodynamics are especially complex given how the rotors and wings are both active. As such, designing controllers for hybrid UAVs currently requires experts “to manually tweak hundreds of parameters,” said researcher Jie Xu, a doctoral student in computer science at MIT.
Furthermore, given the vast differences that often exist between various types of hybrid UAVs, researchers typically cannot transfer controllers from one kind to another, and so they need to design the controllers for each new type of hybrid drone from scratch, Xu added. All this labor-intensive, time-consuming work has contributed to how only a small fraction of possible hybrid UAV designs has been explored so far.
AN AI SOLUTION
Now Xu and his colleagues have developed a way to automatically design controllers for hybrid UAVs. Their system can design a single controller for all of a hybrid UAV’s different flight modes, and can apply to any type of hybrid UAV.
The researchers employed a kind of AI system known as a neural network, in which components dubbed “neurons” are fed data and cooperate to solve a problem, such as recognizing faces. The neural net repeatedly adjusts the connections between its neurons and sees if the resulting patterns of behavior are better at solving the problem. Over time, the network discovers which patterns are best at computing solutions. It then adopts these as defaults, mimicking the process of learning in the human brain.
In the new system, users first design the geometry of a hybrid UAV by selecting components from a data set. The system then runs this design through a simulator to compute this design’s flight performance. The simulator takes into account realistic problems such as random sensor noise and delays in control signals. The neural net then automatically goes about learning how a controller for the UAV can achieve the best performance in the simulation.
The researchers validated their system by using laser-cutting and 3D printing to manufacture three different types of hybrid UAVs, and successfully conducted real flight tests using the resulting controllers. “The biggest advantage of this work is accelerating the hybrid drone design process,” Xu said. “Everyone can get access to this new type of drone design.”
The controller does not need to differentiate between copter and flight modes, or explicitly deal with the transition between modes. For example, the controller will automatically orient a tail-sitter hybrid UAV purely based on its speed, setting it to copter mode for lower speeds and plane mode for higher speeds.
Xu cautioned that the system currently supports only simple flight. The researchers plan to investigate ways to increase the maneuverability of designs—for instance, through the positions or shapes of rotors or wings—so the system “can compute much more complex movement.”
The researchers have made the code for their system public on the software development platform GitHub. “We want this technology to be shared by everyone who is interested in it,” Xu said.




