As tactical UAVs come of age, inertial technology’s ability to endure GPS outages while providing reasonable accuracy at high update rates keeps it as the backbone of UAV sensor systems. Coupling inertial with M-code, anti-jam antennas and vision in the autonomous arsenal can make the sum of parts a very robust solution.
In defense applications, as military users look to achieve new capabilities with unmanned autonomous aircraft, three main areas come into sharp focus: vertical takeoff and landing (VTOL), launching of UAVs from other flying aircraft, and overcoming jamming in GNSS-denied environments. Coupling a high-performance inertial measurement unit (IMU) with other sensing and navigation technologies on a UAV into a highly capable inertial navigation system (INS) can bring a solution to overcome each of these obstacles.
“The GNSS-aided INS is the backbone for these types of systems,” said Jeremy J. Davis, Ph.D., Director of Engineering, VectorNav. “It can ride through GPS outages and do it at high update rates, and still be reasonably accurate. Beyond that, different enabling technologies like anti-jam M-code and vision can merge with it and provide a more robust solution. That is a space of heavy activity right now, and we’re working on solutions internally and with partners that meet these types of requirements and do so seamlessly.”
VTOL, air launch and GNSS spoofing and jamming are all challenging UAV problems that haven’t been fully solved yet, but state-of-the-art companies are designing next-generation vehicles that will take them on.
VTOL
The ability to launch and retrieve a UAV without the expense, exposure and advance logistics required by a runway presents obvious tactical advantages to mobile warfighters. Rotorcraft such as helicopters and quad-rotors require only a small takeoff and landing zone, but they are inefficient compared to fixed-wing UAVs, and have dramatically lower range, payload capacity, and dwell time. Catapult-launched fixed-wing UAVs solve half the problem, but still require a runway for recovery—and catapults are cumbersome to transport.
VTOL aircraft avoid all these disadvantage and bring the cruise and payload advantages of fixed-wing UAVs. There are broadly three approaches to VTOL:
• a hybrid rotorcraft and fixed-wing vehicle, also known as a quadplane, with a set of vertical propellers for takeoff and landing and one or more horizontal props for cruising;
• a tiltrotor vehicle, using the same propellers are used for vertical and horizontal propulsion, rotating them in mid-air relative to the vehicle;
• tail-sitter UAVs which takeoff and land on their tails, like a rocket, but cruise horizontally, accomplishing both types of flight with one fixed set of propellers.
All types of VTOL craft require more from their navigation systems than other types of UAVs. “Takeoff and landing are the most dangerous, riskiest elements of flight for all types of aircrafts,” said Davis. “When you’ve got these VTOL aircraft that are reimagining how to do takeoff and landing, it presents obvious inherent risks. You have to make sure you’ve got all your I’s dotted and T’s crossed.” The introduction of a major in-flight transition at a mission’s beginning and end—quad-planes switch from one set of props to another, tiltrotors rotate their entire propulsion system, and tailsitters switch from getting lift from their wings to solely from their propellers/rotors—presents several challenges for the navigation system. VectorNav has been working through these problems with customers over the last five years and brings this experience to bear on what is rapidly becoming the next frontier for tactical military UAVs. The requirements on the navigation system include:
• Absolute reliability.
Other control dynamics must be carefully monitored and managed; there’s no room to worry whether the navigation system can
be trusted through the transition. For tail-sitters, this also means algorithms that avoid gimbal lock when rotating 90 degrees in pitch during the transition.
• Slow and fast operation.
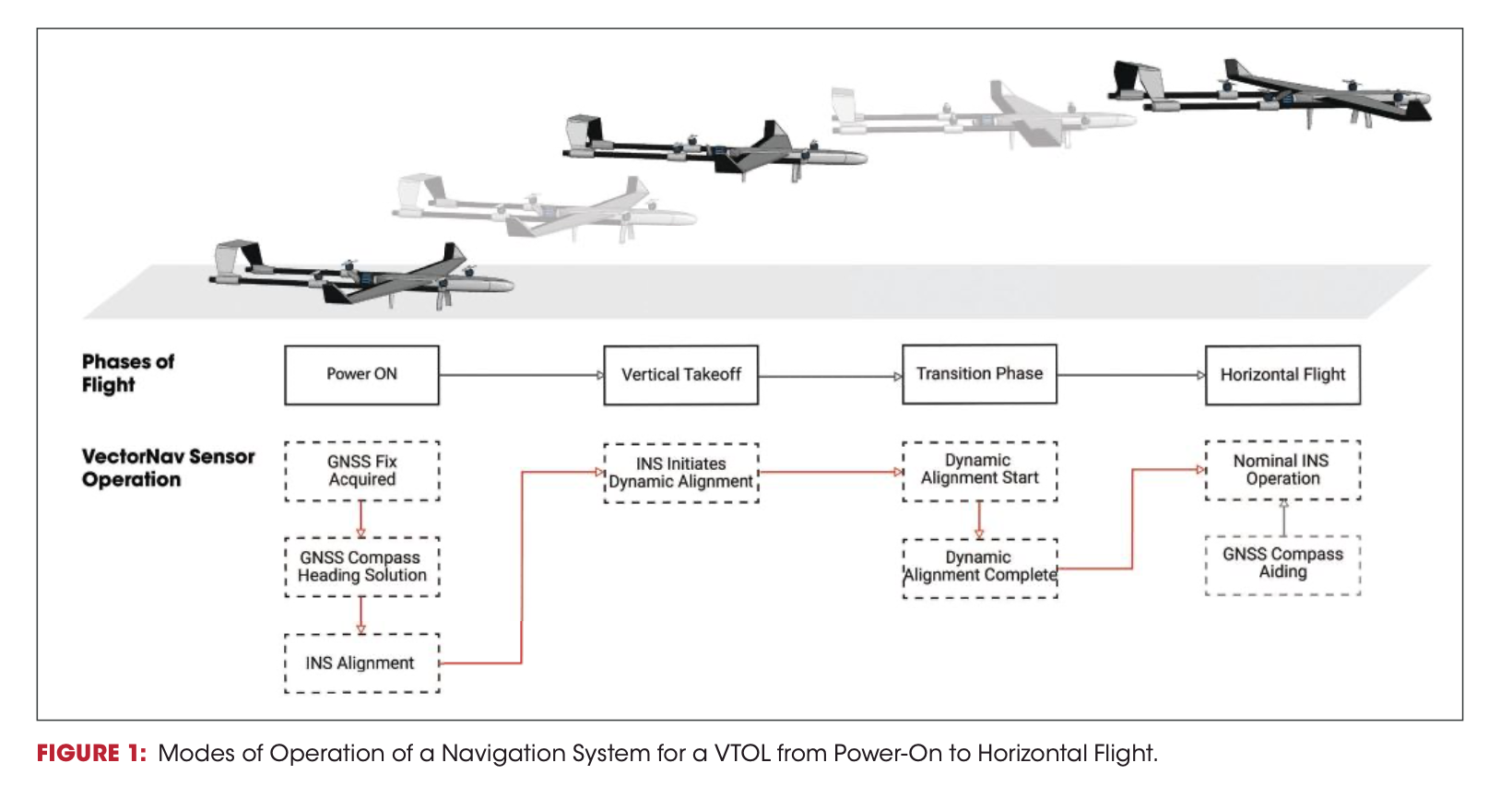
To track heading, hovering aircraft typically rely on a GNSS compass: two GNSS antennas a fixed distance apart. Fixed-wing aircraft use an INS-generated heading following a dynamic alignment process, correlating the motion measured by the GNSS and the IMU. For a VTOL aircraft, both techniques are critical for different phases of flight, and the handover between the two must
be flawless to avoid compounding problems during vertical-horizontal flight switch. VectorNav dual-antenna GNSS systems like the VN-300 and VN-310 smoothly transition between whichever heading source is the most accurate at any given time.
• Landing.
Some of the most advanced systems in development must land on moving platforms such as ships or trucks. This requires extremely high precision. An RTK-enabled GNSS receiver, like those found on the VectorNav Tactical Series units, can provide centimeter-level relative positioning at high update rates.
AIR-LAUNCHED
One way of multiplying the range of a UAV, while also avoiding the downsides of a runway, is to launch it from a much larger air-craft already inflight. These UAVs are often tube-launched, with wings that unfold/unfurl in the first seconds of flight as it emerges from the host aircraft already at top cruising speeds. The transition phase for these UAVs is quite dramatic.
All of this places severe strains on the navigation system: rotations of a few 1,000 degrees per second in the airstream and high acceleration rates. It’s a wild, rolling ride during which GNSS is typically lost, whether due to the high G’s, the abrupt switch from the host’s GNSS antenna to the UAV’s antenna, or the fact that the UAV antenna may not point reliably skyward until stable flight is reached.
Air-launched UAVs must also cope with buffeting from the wake of the launching aircraft. Shocks are high and the accelerations and angular rates experienced immediately upon deployment are extreme until the UAV’s wings unfurl and can stabilize the craft. Stabilization itself it a critical achievement for the navigation system to control, to catch itself before falling headlong downwards.
It’s an exciting handful of seconds. All of this requires the navigation system to run in a pure inertial navigation mode, tracking through high g-loading and higher angular rates. As with the VTOL aircraft, this period right after launch is critical to mission success. Maintaining the level of attitude accuracies that VectorNav has achieved under these circumstances is a non-trivial problem.
The UAV’s navigation system must also handle a process known as transfer alignment, wherein it initializes while still onboard the host aircraft. Depending on the system, this can be handled in different ways. The host aircraft’s navigation system can provide a full navigation solution just prior to launch, from which the UAV INS initializes, though this requires tight integration between the avionics systems. Or, the UAV’s navigation system can be enabled for a short period (30 seconds to several minutes) prior to launch, with GNSS signals provided from an antenna mounted on the host aircraft. This allows the GNSS/INS to fully initialize itself, and then switch its own internal antenna is made after launch. This can be much more robust and can allow lower-risk integration with the host aircraft.
“This is the secret sauce part of the deal,” said Davis. “Getting our filters going and tracking pre-launch, then somehow take this filter that’s working in the rather benign conditions pre-launch, and make sure that it continues to work after being subjected to a really high-G event with crazy tumbling and more.”
GPS-CHALLENGED ENVIRONMENTS
Having to operate with a GNSS signal that may be spurious, or without GNSS altogeth- er, poses a whole new set of problems for a tactical UAV. An active spoofer or jammer in operational theater area interferes with the UAV’s onboard GNSS receiver, and the right mitigation technologies must come into play to maintain accurate tracking in these extremely difficult environments.
GPS M-code receivers now being gradually deployed throughout the US military and those of its allies replace the SAASM (Selective Availability Anti-Spoofing Module) receivers that previously thwarted spoofing attempts. M-code technology also takes advantage of new, more powerful signals from the latest GPS satellites to counter jamming as well. VectorNav’s Tactical Series of INS systems have full support for interfacing with those new types of receivers.
To complete spoofing mitigation, anti-jam or controlled reception pattern antennas (CRPAs) consist of multiple elements, allowing them null signals coming from directions likely to contain spoofers jammers while amplifying signals from known satellite directions.
The combination of a tactical grade IMU with an M-code GNSS receiver and an anti-jam antenna provides a navigation solution robust to common GNSS-challenged (spoofed) environments.
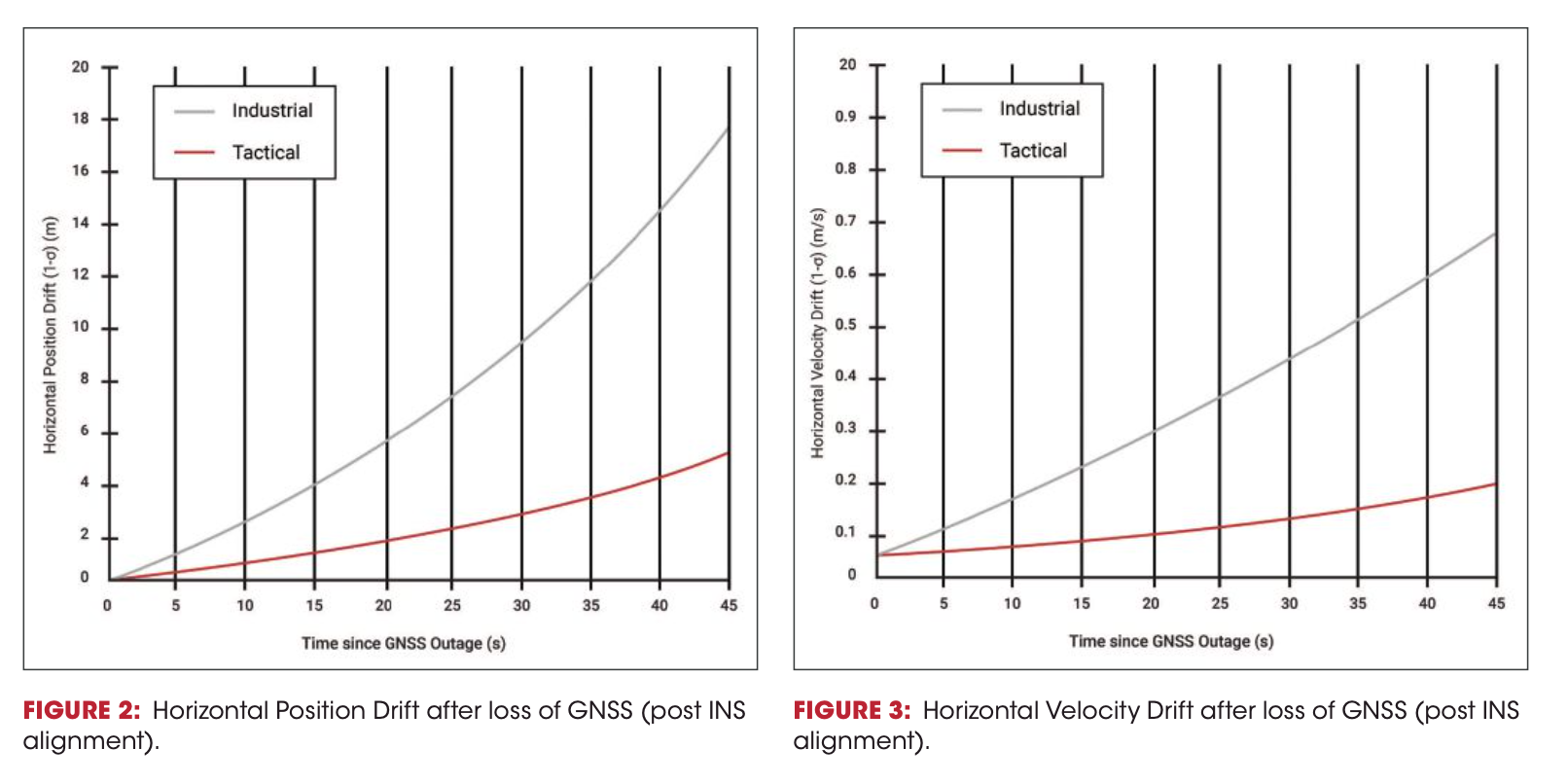
Short-duration GNSS outages, lasting seconds to a few minutes can be readily handled by VectorNav’s tactical grade GNSS/INS sensors like the VN-210, relying on pure integration of the accelerations and angular rates reported by the inertial sensors to provide navigation when GNSS is unavailable.
“Because we have good IMUs in our tactical series,” said Jakub Maslikowski, Director, Sales and Marketing, VectorNav Technologies, “we can handle GPS chal- lenged conditions for limited periods of time. To the extent that somebody does manage to jam you briefly, the inertial sensors will carry you through.”
GPS-DENIED
Increasingly, continued operation in GNSS-challenged environments isn’t enough: UAVs must also operate in fully GNSS-denied situations, where powerful enemy jammers attempt to control the field. Larger systems, including manned aircraft, can rely solely on a navigation-grade INS, which drifts on the order of kilometers per hour. But a navigation-grade INS is far too large and expensive for most UAV applications.
Achieving accurate, reliable navigation without either GNSS or a navigation-grade INS is an area of active R&D at VectorNav involving many different sensing technologies.
Electro-optical and/or infrared (EOIR) camera systems have come into increasing play for GNSS-denied navigation. Image-processing software processes each image to identify unique features that it would recognize again in the next image taken, a process known as feature matching.
If a UAS has pictures of the area taken prior to the mission, by satellites or other overflight, this enables a map-matching approach: matching the features from the real-time images to the stored image map for localization, thus determining UAV position. This can supply high accuracy but requires significant advance preparation. It only works over an already-known area, flying a predefined path at a predetermined time of day, since shadows and lighting differences can impact the accuracy of map- or image-matching.
When a map isn’t available, vision-based navigation systems can create their own map as they go, using simultaneous localization and mapping (SLAM). The drawback of SLAM is that the map will be imperfect, and those imperfections grow over time. SLAM position errors drift as a function of distance traveled.
All vision-based systems struggle, natural- ly, in limited visibility such as clouds or fog. Active sensing systems like radar or LiDAR, which emits laser pulses to produce a 3D map, can replace or augment vision systems. However, active sensing brings the downside of potentially revealing one’s own position to the enemy through the emitted signals.
Finally, all of these technologies fail when the environment, such as large bodies of water or a sandy desert, contains no distinct features.
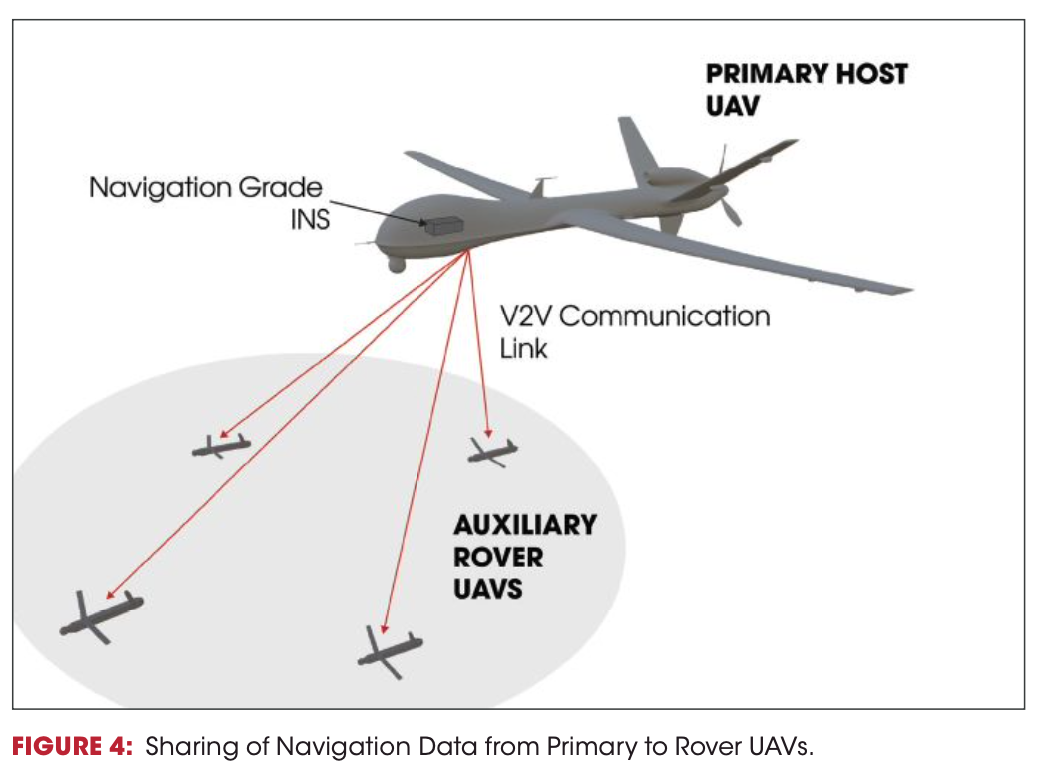
As an alternative to outfitting smaller UAVs with complex GNSS-denied navigation systems, an aircraft “buddy system” can involve multiple UAVs operating in the vicinity of a larger aircraft equipped with a navigation-grade INS. The large, heavy and expensive navigation-grade INS can fly for hours without drifting more than a couple kilometers. This then shares its location with the smaller UAVs through various combinations of radio links, visual markers and other techniques.
Clearly, there is no one solution that counters GNSS signal jamming under all conditions. A robust, reliable and versatile system must combine several technologies, playing the strengths of some off the weaknesses of others. This is where a highly adaptable and flexible INS system with a tactical-grade IMU can provide tremendous value, functioning as the linkage of a multi-sensor system. VectorNav has been working for years with some of the most advanced companies exploring each of these technologies and integrating them with algorithms for a powerful anti-jamming solution.
CONCLUSION
VTOL and air-launched UAVs will dramatically alter the landscape of UAS for military use. Their unique flight profiles, however, require sophisticated navigation systems that go beyond traditional INS capability. VectorNav is taking the lead in integrating the latest navigation technologies to handle these demanding situations.
Making these systems robust to GPS- denied conditions means integrating the latest PNT technologies, from M-Code to anti-jam to vision. Working closely with a partner like VectorNav that can integrate with these various complementary technologies can provide tremendous value and save considerable engineering resources. Go to www. vectornav.com to begin the process.