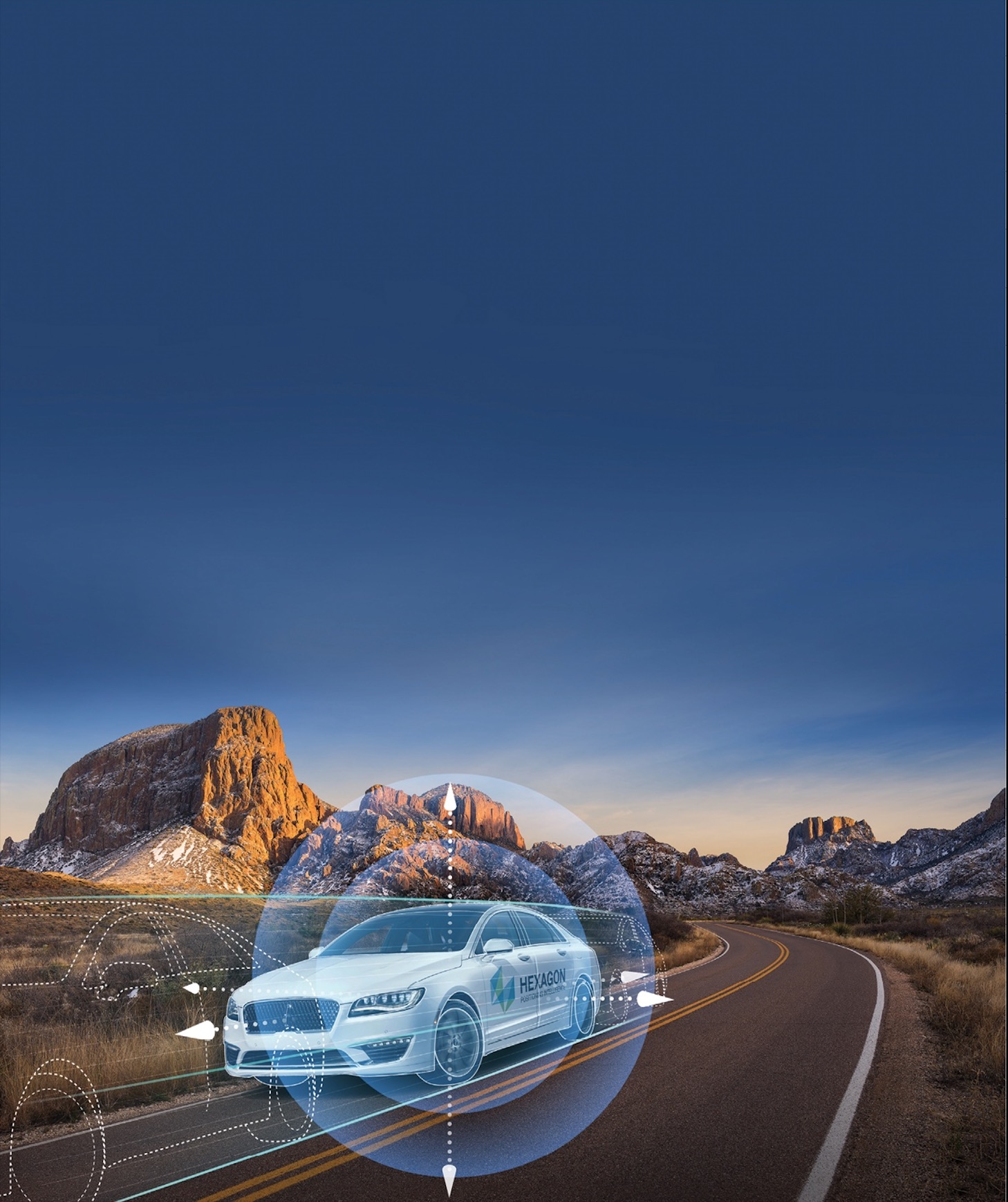
Photo courtesy of Hexagon Positioning Intelligence
Whether it’s an unmanned aircraft system (UAS) performing an infrastructure inspection or a driverless vehicle taking passengers to work, it’s crucial for autonomous systems to safely and accurately navigate to their destination.
The level of accuracy needed for a drone flying in open airspace is different than what’s required for a car that must stay in its lane. But, in both cases, a variety of sensors continuously work together to keep these systems on their paths, including LiDAR, radar, GNSS and INS.
“Sensor fusion is critical,” said Andrey Soloviev, CTO at SoloNav, a company developing a software platform to eliminate the need to redesign systems after a sensor is added or taken away. “There’s not one single sensor you can use to do everything you need. They all have their pros and cons, so you really must have the fusion.”
GNSS and INS are two critical elements, and it’s important for anyone delivering autonomous solutions to understand why they’re necessary pieces of the puzzle, but that they’re also not the only pieces.
“High-accuracy positioning solutions are moving beyond GNSS and even GNSS+INS. Sensor fusion experts of the future are combining all the available sensors to provide accurate positioning in increasingly challenging environments,” said Miguel Amor, Chief Marketing Officer for Hexagon Positioning Intelligence. “This sensor fusion, along with authentication and anti-jamming technologies, is critical for a system to provide safety of life. Adding global corrections services completes the picture.”
GNSS – Absolute positioning and reliability
GNSS is the only sensor that provides absolute positioning for autonomous systems, said Jan Van Hees, Director of Marketing and Business Development for Septentrio. All the other technologies extrapolate from an assumed position, and if that position is not regularly updated, it will have increasing errors over time. LiDAR and other visual technologies derive position in respect to objects they’re observing.
“It’s also important to understand that reliability is key,” Van Hees said. “Most people tend to know GNSS or GPS from the consumer environment, which isn’t always reliable. I don’t mean it breaks down but it does jump around sometimes and gives you inaccurate positions. A lot of times people think they can just trust those positions when they can’t. Or they’ve experienced problems and think GNSS can not be trusted at all. With professional GPS, different technology and much more processing is involved to avoid those kinds of errors and to provide reliable information, but it’s important to know they’re there. It’s crucial to derive systems that eliminate those jumps and those misleading positions being fed into the system.”
With GNSS, every measurement you take is a new measurement, Van Hees said, and is not influenced by errors in a previous measurement, which is critical in areas like INS or map matching. Map matching requires accurate positioning of the vehicle and other objects in the map. Positioning needs to be updated constantly to avoid a pile up of errors and a meltdown in the system, and GNSS provides that. IMUs drift and require constant recalibration, and other sensors, such as LiDAR or radar, are influenced by snow, rain, and other environmental factors. GNSS is not. GNSS fails in different ways than other sensors, making it the perfect complement for overall platform reliability.
Photo courtesy of Hexagon Positioning Intelligence
“GNSS is the most reliable, accurate and easy to integrate technology available to provide absolute positioning, making it a fundamental element of the multi-sensor environment,” Amor said. “It provides the information necessary to know precisely where the autonomous vehicle is in the world to enable navigation and provide information when objects like road lines are not visible. Non GNSS technologies like LiDAR, radar, and cameras help an autonomous vehicle to know what there is around and a position relative to a specific object.”
It’s important to keep in mind the position GNSS gives is always relative to a datum, said Stuart Riley, director of engineering at Trimble. GNSS offers quick, relatively low-cost absolute position that could be used as a seed position or fused with other sensors, providing a better solution that takes advantage of different systems’ strengths and weaknesses.
In UAS, GNSS is used for guidance and control in real time, Riley said.
“If you’re collecting images, you want to understand where the geo-references need to be to give you the most absolute positon, but then of course you need to understand the datum,” he said. “You don’t need absolute positon for every application, but it certainly offers an advantage.”
Common misconceptions
Many people think low cost single frequency GNSS receivers provide the same accurate positioning as a multi-frequency receiver, Amor said. Some aren’t aware of the crucial role the antenna plays, or the importance of correction services like PPP and RTK Networks. Not all players thoroughly understand how to use them, their differences and the complexities and consequences of mixing both inn the system like for example the different geodetic reference frameworks.
If you’re going to use a corrections service like RTK, you need to determine what data links to use, how robust those links will be, what range the data links will have, and what happens if a link goes down, Riley said. It’s also important to realize GNSS doesn’t work equally everywhere. It should work well if you’re flying in an open area, but if you go into urban canyons, for example, performance will be compromised. Land vehicles, of course, face more challenges.
“There are a lot of differences in the types of solutions you can use in terms of accuracy and integrity,” Riley said. “How well has the manufacturer looked into these things to make sure you get the maximum out of the measurements? Are they using some sort of RAIM or other technology to get rid of bad measurements from hostile environments, and have they really addressed multipath?”
Keep in mind that when integrating GNSS, it’s not as simple as dropping chips in, Riley said. There are a host of system integration issues to consider, including jamming and electro-magnetic interference (EMI). Things also become more complicated if you add inertial.
Integrity
In the context of GNSS positioning, integrity is the level of trust that can be placed in the solution provided by the system, Amor said. Accuracy, on the other hand, is the degree to which the estimated position aligns with the true position.
“The concept of integrity is the fact the sensor will tell the user how trustworthy the output is,” Van Hees said. “It’s capable of alerting the user if the output is not sufficiently certain in its quality for it to be usable. That is important because GPS is inherently a statistical process. There’s always risk of an outlier.”
Integrity is crucial, Soloviev said, and while manufacturers are working on solutions, more research is needed.
“It’s related to those measurement outliers,” he said. “If everything is fine and the measurements are basically following the model you’re using for sensor fusion, you’re in good shape. But what if you have non-stationary components in images and multipath in GNSS? Then it becomes an issue. You think your solution is accurate at the 10 cm level but the actual error is 2 meters. Then you’re not in the lane any more if you’re a self-driving car, and that’s an issue.”
Driving adoption
There are a many of factors fueling the adoption of autonomous systems, Riley said, including advanced sensors and the availability of economical airframes. UAS are also making it safer and more cost effective to perform a variety of jobs, driving interest across many verticals.
GNSS has reached tipping points in the last decade, Riley said, with the addition of satellites making access possible in areas that it wasn’t possible before. GNSS can be fused with inertial in a small form factor at a lower price point, making it more attractive.
The availability of PPP also has helped spur growth, Amor said.
Inertial Navigation Systems (INS)
The benefits of INS
These systems, with their IMU hardware component, provide measurements that are based only on the internal motion of the vehicle; they are immune to interference or jamming, VectorNav CTO James Doebbler said. INS also isn’t susceptible to en- vironmental factors, such as rain and fog, like vision-based sensors are.
INS brings all the sensors together, and is a critical component of a multi-sensor setup, SBG Systems CEO Thibault Bonnevie said. It can determine the best sensor to use based on the environment.
“For a short period of time, INS can show a disturbance with other sensors and allow normal operation and maintain performance without serious degradation,” Doebbler said. “The downside is the system’s performance will degrade with time. It’s comple- mentary and a big part of sensor fusion. While it can detect and reject errant mea- surements from other sensors, it still needs to rely on those sensors in the long term.”
Simply put, INS is the fallback solution to secure operations when other sen- sors aren’t available, said Hans R. Petersen, Vice President Product Development & Marketing at Sensonor.
“In this “blind” situation that can last for longer or shorter time periods, the system or application has to rely on the INS system,” he said. “Depending on the criticality of an oper- ation or application, one can allow for shorter or longer failures or outages in other sensors.”
INS and GNSS together
Many unmanned customers don’t understand the difference between IMU, INS and GNSS, or the bene ts of fusing their INS and GPS together, Bonnevie said. Fusing INS with GPS offers the best results, but some still opt to have separate systems.
“A lot of customers on the ground and in the marine sector are using an inertial sensor on one side and GPS or a GNSS receiver on the other side but aren’t fusing them together,” he said. “Fusing inertial data with GPS data gives a way more robust, accurate position.”
MEMS
MEMS technology has reduced the size of IMUs while still offering optimal performance, but it’s important for the unmanned community to understand they’re not all created equal, said Mark Chamberlain, CEO of LKD Aerospace. The commercial grade IMUs found in a smart phone might be small, but they won’t provide the performance you need. The IMU must be able to operate continuously in environments where there might be large temperature swings, high vibration and launch shock.
“The IMU is providing angular rates and linear acceleration to provide attitude orientation of the vehicle,” Chamberlain said. “That’s fed into flight control and navigation and combined with GPS and other sensors. Navigation and flight con- trol can be handled by the inertial com- ponent and if GPS is lost, it can navigate.”
GNSS can’t provide attitude on its own, and systems without INS just don’t provide quality yaw, pitch and roll mea- surements, Doebbler said.
Driving adoption
While SWAP-C (size, weight, power and cost) has a major impact on most appli- cations, for the autonomous market to really take advantage of the performance available in small INS systems, the cost still has to come down, Petersen said. That has the potential to happen as vol- ume grows, but the cost barriers are still high for new entrants into the market.
“A commercially available low cost solution is at least a decade out,” he said. “When such a solution falls in place, there will be a historic and complete shift in the industry because every device will have inherent navigation capabilities, be-
coming independent of any GNSS sys- tem and/or other sensors to determine its own position.”
Even so, the sensors have come a long way. If you look back 20 or even 10 years, similar technology was bigger and more expensive, Bonnevie said. With MEMS, SWaP-C is more favorable, making it easier to incorporate INS solu- tions into unmanned systems. Today’s solutions also have more capabilities. While there are a range of options available, the professional grade solu- tions are more robust and provide the precise positioning autonomous sys- tems need to safely complete missions without worrying about jamming or interference, Doebbler said.
“The increasing power capability of MEMS is hedging closer to much more expensive, larger gyroscope systems,” Chamberlain said. “That has led to opportunity and investment in unmanned and underwater vehicles. The increased perormance of MEMS enables a lower cost, a lighter weight and more functionality.”
Outputs are also faster, leading to low latency, Chamberlain said. That, combined with SWaP-C and the fact these sensors can function through high tem- peratures and vibrations, and aren’t susceptible to environmental factors, make INS a compelling solution for this market.
“It’s a huge enabling technology,” Doebbler said. “Pretty much all UAS have some kind of motion. That navi- gation component and knowing where you are and where you need to go re- quires attitude. There’s almost no un- manned application that I can think of that doesn’t need those things with varying degrees of precision. Robustness is a key factor. An internal IMU is what you need to tie all the other sensors together and deliver that robustness.”