Did you know there was gold in Finland?
Did you know there was gold in Finland?
Exyn Technologies was asked to find out if an old mine still had any of the shiny stuff.
“They essentially gave our team a map and said, ‘drive through the mine and map out all of these tunnels,’” recalled Denise Wong, principal robotics engineer for the Philadelphia-based company. That meant, among other things, negotiating various stopes—the open spaces left behind by underground mining. “They had these massive, unconventional shapes and we had no idea what we were flying into. There are no maps!”
In the event, Wong reported, Exyn’s Autonomous Aerial Robot (A3R™) “mapped 30 stopes in three days. “With this information I believe they were determining whether or not it was worthwhile to pursue this project, and looking to sell this mine to an investor.”
While Exyn also works in the construction, defense and rescue sectors, “we specialize in underground mining,” Wong noted. “Underground mining is a great use case for us because it’s an environment that has a lot of hazards, lots of areas that are not basically protected by a mesh from falling rock. It’s an open cavity where just a couple of hours before they had shut off the explosives blasting these rocks out.”
These pitch-black spaces can create safety issues with human and economic cost. “It’s dirty, it’s dusty, it can be wet,” Wong noted. “Sometimes you’re trudging through pretty thick mud, you’re wearing a lot of protective equipment. It’s like a 20-30 minute drive to get to the rock space you want to work in, you do a couple of hours of work there and then you have to come back up. It’s not like you’re going to a desk.”
Exyn’s A3R system offers a single-system solution for onboard, automated 3D LiDAR mapping and data collection within potentially troublesome spaces. “It’s totally autonomous. You tell the robot what you want it to do. It could be, ‘fly to this position 50 meters away,’ or ‘here’s a volume I want you to explore. Fly through it, explore the area and then, when you’re finished, return home.’
“We’re hoping to have the robot do all the dirty, dangerous and dull work. There are just areas that are not made for people to go into. It’s much better to send a robot in.”
 Probing the Darkness
Probing the Darkness
Wong discovered aerial autonomy while a Ph.D. student at Penn, where one of her lab courses was taught by Exyn’s founder. “I worked on microrobots, a centimeter or smaller,” she recalled. “What really drew me to Exyn was applying really innovative technologies into the commercial space.”
Currently, Wong runs Exyn’s mapping team. “That’s everything after the flight. Looking at generating the maps, trying to get useful information for our customers out of it and making sure they can ingest that data and do whatever the need. For mining, for example, they want a survey grid map with enough detail to make sure the blast did what they planned for it to do. In construction, it would be change detection, making sure that the model and what’s actually constructed match.
“Where we come in is being able to fly very close to the structure fully autonomously, so you’re not having a person walk through taking pictures any more. You’re having this data show up, and you can use a computer to analyze it.”
Mine mapping can involve working within a GPS-deprived environment. “You really don’t have any kind of GPS signal; when you’re turning the corner, you completely lose any kind of WiFi or wireless-connected video, with this giant piece of rock in between. So it’s really important to be able to have all the intelligence, and all your sensors directly on the robot.”
Enter ExynAI™. “That’s really what we specialize in as a company: the autonomy software, the ability to navigate through the environment, figure out where it is in the environment and figure out the path planning to execute, to fly to its next location, to execute its goal or explore a space.
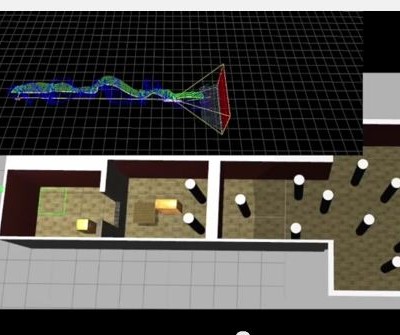
“What our technology really enables is not needing any prior information about the environment at all,” Wong continued. “You just place the robot on the floor, you turn it on and with the sensors that are on board—predominantly we’re using the laser scanner and an inertial measurement unit. A laser scanner is giving you the lay of the land in a 3D view of where your flying. The inertial measurement unit is giving you a rough idea of how much you’ve moved in every direction. By combining that information, you can build this map of your local area.”
That SLAM (simultaneous location and mapping) technology allows for map-building and updating within a yet-unknown space while locating a device’s location within it. “We start out not having a map of the environment; we’re building it as we go through. The localization part is figuring out where the robot is within the map that it’s building. It’s kind of feeding back on itself.”
The robot can fly for just 15 minutes on one battery, and Exyn is looking into swaps. But, Wong noted, “for the most part, in the mining environment, 15 minutes will cover much further than you really need. For some of these cavities, it’s a two-minute flight, maybe about 20 meters forward, 40 meters up, and then back down and back up.”
Data delivery also is autonomous. “If you have a fully-connected WiFi, you can immediately collect the data, looking at the data in real time that the robot is processing. But everything runs onboard so that’s not a necessity. Because our system’s autonomous, you can imagine having it on a timer and it flies through a construction site at night when everybody’s home. When people come in in the morning, they can analyze the data.”
Use Cases
Exyn embarked on another gold exploration, this one at the Ascot Resources mine in Stewart, British Columbia. “It was closed in the 1940s,” Wong said. “At the time it was exhausted, no equipment to dig further. Now, with new technology, they want to see if there’s more gold that can be extracted. It’s an exploration exercise to go in, map the site, get a lot more detail on the most up-to-date information on what the site looks like. You can’t really rely on a hundred-year-old map of a mine.”
Getting to the site from Philadelphia was the first hurdle: nearly 13 hours, including a cross-glacier helicopter flight and a trek up a half-kilometer incline. Only then did the job begin.
“Ascot Resources was looking to create a highly detailed map of the existing tunnel, the existing infrastructure. The tunnels are much smaller. For us, it was a combination of walking with our robot through the tunnel because it was just so small, too small for us to fly through. And then, when we get to a big cavity, we would take off, fly into the cavity, generate a map of the area where we can’t walk through, have the robot come back, and repeat.”
 Exyn is looking to expand its brief. Another Canadian company is using the robot in a mine in Bulgaria. Exyn is researching whether it can surmount import restrictions and enter the Indian market. Closer to home, Wong noted, the technology has been tested above ground, in dense urban environments where GPS can be unreliable. In one case, that was very close to home. “We did a demonstration in a partially deconstructed, partially demolished old chocolate factory across the street from our office,” Wong said. “They tore it down recently, but we had a chance to fly through and create a map.”
Exyn is looking to expand its brief. Another Canadian company is using the robot in a mine in Bulgaria. Exyn is researching whether it can surmount import restrictions and enter the Indian market. Closer to home, Wong noted, the technology has been tested above ground, in dense urban environments where GPS can be unreliable. In one case, that was very close to home. “We did a demonstration in a partially deconstructed, partially demolished old chocolate factory across the street from our office,” Wong said. “They tore it down recently, but we had a chance to fly through and create a map.”
Wong and the Exyn team are monitoring industry-wide technology developments. “We heavily leverage LiDAR technology. The LiDAR industry saw a big boom because of autonomous driving; we’re hoping this will continue. We’ll have higher accuracy and lighter-weight laser scanners. If you’re thinking about flying closer to objects or people, you really want that higher level of reliability.”
They’re also monitoring advances in data interpretation, fashioning digital twins and integrating drone technology through the full construction and inspection process. “We’re always looking toward making the applications more practical,” Wong concluded. “Right now, we’re flying single robots. Why fly one robot when you can fly five robots working together for real-time situation awareness or data?”