AeroVironment’s role in fielding Ingenuity is built on a body of work that dates back to its roots exploring human-powered flight, up through miniature products such as the aptly-named Hummingbird and today’s HALE (high altitude long endurance) solar vehicles.
For the Mars Helicopter Project, AeroVironment designed and developed the airframe and major subsystems, including its rotor system, rotor blades, and hub and control mechanism hardware. The Simi Valley, California-based company also developed and built high-efficiency, lightweight propulsion motors, power electronics, landing gear, load-bearing structures and thermal enclosures for NASA/JPL’s avionics, sensors and software systems.
(The following “oral history” has been edited and reordered for clarity.)
DESIGNING IT
BEGINNINGS
MATT KEENNON: [AV’s technical lead for the rotor system development on Ingenuity and an AeroVironment principal electrical engineer]
AeroVironment started as a company making pedal-powered airplanes, unusual man-carrying airplanes, a Solar Challenger. When I came on board in 1996, we were developing small surveillance aircraft for the military, including a flapping-wing aircraft. We did a lot of DARPA work and DARPA (the Defense Advanced Research Projects Agency) does the really far-out difficult things, not knowing necessarily where it’s going to go. The Hummingbird was a basis for our weird and unusual flying machines that seemed to suit problem-solving for unusual application, unusual requirements, really difficult customer requests.
JPL asked us, “How can we demonstrate flight in Mars easily?” and when I came on board, I brought in my ideas from those other projects. We did the sub-scale, and we also did this other one, which just had a motor and rotor blades. It went up and down on rails, it actually looked like the real helicopter, but it’s just basically an empty fuselage. But they all served their purpose of getting the excitement and interest levels raised to the next point of funding.
BEN PIPENBERG: [AV’s engineering lead on the Mars Ingenuity Helicopter Program and AeroVironment senior aeromechanical engineer; worked on sub-scale, larger demonstrators and the final build]
Around 2012, 2013, the idea popped back up. The JPL chief engineer for the program came back to AeroVironment and said, “Hey, what do you think about helping out with something like this?” That grew into small-scale risk tests, essentially just putting a rotor system into a vacuum chamber representing a Martian atmosphere, just demonstrating that we can generate lift.
Early on, there was doubt, even within NASA. There isn’t data out there that tells you how this is going to work or what isn’t going to work. Coming up with tests that are relatively cheap and easy, and allowed to fail—that’s pretty important.
OPERATIONAL REQUIREMENTS
PIPENBERG: The big challenge with a helicopter like this is that you’re not setting a helicopter on the surface of Mars and then flying it. You’re really designing a small standalone spacecraft that also happens to fly. That really defines what a lot of the vehicle requirements are.
The environmental requirements were straight from JPL, from the Mars 2020 mission: the Perseverance rover, mission, launch load requirements. With the launch vehicle—an Atlas V—there’s a vibration spectrum we have to survive that defines most of the loads the helicopter is designed against. For controls, there are very specific requirements: natural frequency, rotor blades for hubs, landing gear and all of that flowed down from the JPL-GNC [guidance, navigation, control] team. Sizing constraints was a huge one—what the vehicle is going to have to fit within. And that kind of went both ways, right? AeroVironment saying, “Hey, this is what we need.” And Lockheed Martin [its Mars Helicopter Delivery System was designed to transport and deploy Ingenuity] and JPL working to accommodate that, and also us working to change the vehicle design to accommodate the space available. There was a lot of back and forth on a lot of the environment sets.
SURVIVABILITY
PIPENBERG: The first small-scale demonstrators that attempted controlled flight in the chamber [December 2014] were relatively uncontrollable. Those initial small-scale helicopters were essentially built the same way we would build a helicopter that flies here on Earth. The problem we ended up having is that, essentially, in a Martian atmosphere you have these rotors spinning really fast, you have very low aerodynamic forces relative to the inertial forces in the rotor. And so the way the rotor system reacts to control inputs is very different. You also have much lower aerodynamic damping. Think of it like this really high-speed spinning flywheel you’re trying to control with very low aerodynamic forces, and there’s no damping. So when you see these things flying, they’re kind of all over the place, totally uncontrolled. We didn’t realize that initially, so after we learned that, then, “OK, where do we need to put a lot more time and effort into the analysis? Where is it really going to be paying off for us?”
That was kind of when JPL took on all of the avionics development, all the guidance, navigation control, all the simulation modeling. For the most part, they handled all the batteries, charging solar array, all that. And AeroVironment took on the airframe, a rotor blade design, propulsion motors, servo swashplates, the primary structure.
KEENNON: Then we went to the full-size demonstrator, the risk reduction, which was really a beautiful piece of engineering. That was the first one that used the full-sized rotor blades. These were all AeroVironment builds; the risk reduction aircraft had the titanium parts that JPL made.
PIPENBERG: In addition to all those [space and Mars] environments, it has to survive a test environment here on Earth. Before we ever get to Mars, we’ve already gone through almost the entire operational life of the helicopter. Flying on Mars is relatively benign compared to launching on a rocket, in terms of vehicle loads. The hub reaction forces in flight are very small compared to launching on the rocket. That’s really the challenge—you’re not just designing this to fly on Mars, unfortunately; we’re trying to design a very small, lightweight spacecraft that also happens to fly.
ITERATIONS
KEENNON: A dozen concepts on paper were never built. The first one [built] was a box with a motor and rotors, but the first thing that looked like a helicopter. For the subscale, there were two versions that had slightly different layouts, different passive stabilization systems.
Then we went to the full-size aircraft. There was one version we called the risk reduction aircraft. And then we get into where Ben really was taking over the engineering design models.
PIPENBERG: Two engineering development models were intended to be very similar. One was used for flight testing in the JPL 25-foot-wide space simulator. The other was used for environmental testing: thermal vacuum testing, launch loads, putting it on a shaker table and vibrating it, trying to simulate launch, as well as shock testing, radiation and stuff like that. Those two helicopters were functionally similar to the flight vehicle, and what we learned from those helicopters, we would roll into the flight model.
KEENNON: We also built something that looked like a helicopter that was just designed for testing the landing gear, the shock absorbers, the angles. We did all this stuff in a motion capture room; it wasn’t a functional helicopter, but it was a functional prototype for testing the landing gear.
PIPENBERG: At the end, it all came together. The airframe, the rotor system, the landing gear, all of that was mated to the avionics, the batteries, the solar array, which was a big team effort. Solera developed the solar cells, we developed the structure they’re mounted on and it was mated onto the rover through Lockheed Martin’s deployment system. A huge team effort.
That final flight model had everything built to really survive on Mars.

READYING IT
JEREMY TYLER: [AV’s senior aeromechanical engineer; significant mechanical design work for most of the metal and plastic components: servos, linkages, swashplates, landing gear, hinges, springs, latches]
Thermal expansion was a huge challenge. The operating temperatures on Mars are extremely cold, generally, but they’re also very widely varying—it could be negative 100 Celsius, or it could be positive 20 Celsius.
But even that isn’t the full range. Every component of the helicopter had to be completely disinfected. For simple things, we could wipe them down or soak them in alcohol. But partially assembled structures that might be damaged by alcohol, we had to bake them in an oven. So we had very high temperatures that the things had to survive, while also being able to withstand the low temperatures of service. It was a unbelievable range of requirements.
Also, a large portion of the Perseverance mission is to look for signs of past life. This is probably the most critical Mars mission so far in terms of biological cleanliness when it arrives. Every component had to be designed to be cleanable; every captured space on every captured component had to be accessible, such that it could be thoroughly disinfected. Even from the mechanical design, we had to figure in disinfecting.
KEENNON: And this is our first space project, so we had to add all this into our plans and our budgets. They came out with their gloves and petri dishes and swabs, inspecting, and taking samples from our work areas. It was intense.
SYSTEMS CHALLENGES
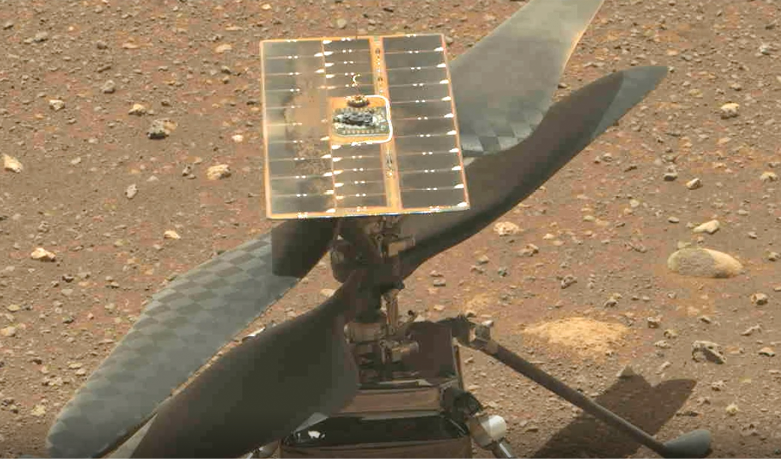
PIPENBERG: A lot of the features you can see on the helicopter were directly a result of GNC requirements. For example, flying in a Martian atmosphere, there’s very low damping; you’re essentially flying a gyroscope. And so, rather than having a huge rotor system like what you would typically have on a helicopter here on Earth, we made a very, very stiff rotor system. And with a counter-rotating, coaxial helicopter like this, your net angular momentum is therefore zero.
Making the rotor system really rigid significantly simplifies how you can control that helicopter. A lot of what you see on the helicopter in terms of even the rotor blade shape, very high taper, relatively thick for how low the Reynolds Number is on these rotor blades—that’s all for structural reasons. That really defines a lot of the reason the helicopter is built the way it is. So, even though we didn’t work on the GNC side, we had to account for that in almost all of the design aspects just to make it controllable. It was a very, very close collaboration between the GNC folks and the mechanical folks.
CHINESE WEIGHTS AND TENNIS RACQUETS
SARA LANGBERG: [AV aeromechanical engineer; testing, especially on the blades; mechanical design and fabrication, especially composites. Also swashplate geometry and building load models for the blades and how that interacts with the servos, plus landing gear system in general]
When we’re spinning at such a high RPM, different loads dominate than there would be on Earth. The blades are subject to three loads. There’s the aerodynamic load and an inertial load of the blade through its rotations. But there’s also the propeller moment, which is called “the tennis racquet effect.” It’s the tendency of the blades at an angle to try to flatten themselves as they spin, due to having an off-axis center of gravity like we do.
On Earth, that’s a relatively small issue and doesn’t often need to be accounted for. But because we’re spinning five to 10 times faster on Mars, this effect really dominates. In order to get the servo loads down and into a range where we can get good servo response, we added these counterweights, called “Chinese weights,” to the rotor. If you look at the blades, there’s a hollow carbon fiber cone on each and a tungsten ball in the tip that acts as a counterweight. That counteracts the propeller moment effect, and it doesn’t try to flatten itself quite so much. They’re optimized to reduce the servo loads the most at a hover condition.
KEENNON: The blades are actually twisted, and they’re actually trying to untwist and become flat. So it’s not only grabbing or counterweighting the whole blade, but it’s actually making the blade torsionally stiff enough. That was another driver that fed into the mechanical design of the blades, which again, comes from our high altitude aircraft propeller designs.
We don’t want to add mass to the blade, but we can’t have them untwisting, unfeathering. So, problems upon problems would crop up, and then we would have to solve them in ingenious, lightweight, clever ways. Our background doing these other weird, lightweight, small aircraft, even like the Hummingbird, helped us think about these things in a different way and solve them.
TYLER: On top of all that, the rotor blade is a very highly cambered airfoil, which is quite unusual for a rotorcraft, or at least for a cyclic pitch rotorcraft.
KEENNON: It’s inherently unstable. It can’t fly for a half-second without making decisions based on the IMU and driving the control system. We’ve tried flying this type of helicopter without a control system. It goes bad quickly. It’s just the configuration of a coaxial helicopter.
TYLER: The coaxial router system has no gyroscopic damping whatsoever. Without a digital controller, without a gyro-based autopilot, it’s entirely uncontrollable.
With all those aerodynamic loads of flying and camber and twist, still the inertial loads were dominant. Sara’s analysis, designing those counterweights to ideally balance the inertial loads to the aerodynamic loads, let us really optimize the servo weight, and really minimize the size and power that was needed for those servos to get the bandwidth that was required from the GMC folks at JPL.
THE MEANING OF IT
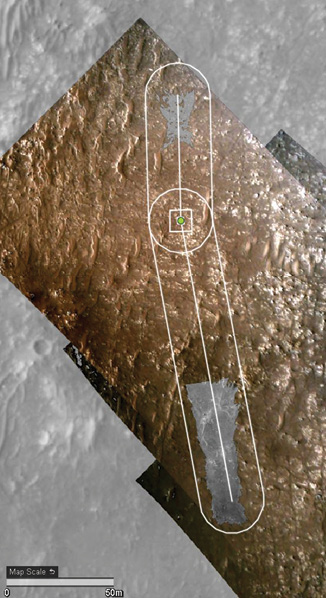
On May 7, the Ingenuity Mars Helicopter became an operational scout in addition to its original role as a technology demonstrator. Leaving both Wright Brothers Field and the Perseverance rover behind, Ingenuity flew for 110 seconds, traveling 423 feet at a new height of 33 feet, capturing high resolution color images before landing at its new Red Planet home, which bears the tepid but significant name Airfield B.
PIPENBERG: It’s going to lead to more capable science vehicles on Mars. In general, there are a couple of options. There are much larger helicopters that are being designed kind of as a rover replacement—a big standalone science vehicle that can fly around, has instruments on board. There’s paired concepts with a lander like [2018’s] InSight—you have a smaller helicopter, or a quadrotor, or hexacopter, sort of like Ingenuity-size, that can go fly off and gather samples and bring them back. And then you’ve got scouts for mapping missions, where a small helicopter paired to a rover or a manned mission to Mars, can gather better imagery, or just operational awareness of your surroundings. There’s a lot of different ways to go.
At AeroVironment, we are looking at future technologies that can help: new materials, new fabrication methods, new designs, various types of mechanisms that could be enabling for some of these missions. NASA has published a number of papers as well on kind of the Cadillac science mission; they’re really big standalone helicopters. So there’s a lot of interest, obviously, with a lot of excitement. And I think the big hope here is that that generates really good ideas.
WRIGHT BROTHERS ON MARS?
LANGBERG: I think it’s very much a parallel Wright Brothers moment, in the sense that we’re doing something that no one has ever done for the history of humanity. Way back then, they were doing something everybody thought was impossible. Look at where aviation has taken us now. So I think there’s a lot of parallels into how this is going to open similar doors, but for space exploration.
KEENNON: This thing is the first combination aircraft and spacecraft, and that is such an insane level of stress put on the designers.
PIPENBERG: It’s a good demonstration of where we’re at in terms of autonomous vehicles, in terms of spacecraft, rockets, deep space communications.
We’re all extremely excited that Ingenuity’s success on Mars has allowed NASA to transition the helicopter from a technology demonstration into an operational demo phase. The increased range and endurance demonstrated in the most recent flights can enable more advanced missions, such as dedicated sensor platforms, mapping applications and sample collection systems.
We’ve had our fingers crossed that we would be able to show that Ingenuity can provide a new dimension to planetary exploration on the surface of Mars, and this next phase will allow us to do just that.
This is really a labor of love.