Geonumerics, a Spanish/Catalan geospatial company, is directing an intensive flight campaign project, RPAS EGNOS Adoption and Liaison with navigation integrITY (REALITY), to generate a large amount of drone-flight navigation data to study of flight-error properties: in general terms, how much a drone is able to stay on track.
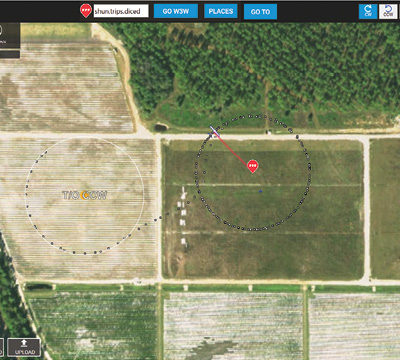
 REALITY will concentrate on studying the Navigation System Error (NSE) — the accuracy of the navigation solution — and Flight Technical Error (FTE), the deviation from the desired course. These two factors are the main contributors to the Required Navigation Performance (RNP) metric. REALITY aims to give a new sense to the RNP figures, which have been traditionally used only for manned aviation, and adapt them for the drone community needs.
REALITY will concentrate on studying the Navigation System Error (NSE) — the accuracy of the navigation solution — and Flight Technical Error (FTE), the deviation from the desired course. These two factors are the main contributors to the Required Navigation Performance (RNP) metric. REALITY aims to give a new sense to the RNP figures, which have been traditionally used only for manned aviation, and adapt them for the drone community needs.
A key in this scheme is to generate “statistically meaningful” data; that is, as many samples of data as possible in order to decouple the assorted variables that play a role in RNP performance level, such as: type of drone, type of flight, autopilot settings, weather conditions (particularly, wind), and so on. REALITY will collect more than a hundred flight data sets as a basis for this analysis.
The partner in charge of the intensive flights, CATUAV, has integrated the REALITY Navigation Unit (RNU), developed by Pildo Labs, that incorporates all the necessary navigation equipment in order to perform the RNP analysis. After every batch of data collection, GeoNumerics is in charge of generating the RNP analysis. Aiming to represent the two most representative drone types, both a rotary-wing and a fixed-wing platform have been selected for the integration of the RNU.
REALITY will map non-recreational drone application-specific requirements into navigation performance and safety requirements –i.e., into accuracy, availability, continuity & integrity– and analyze to what extent drone navigation systems based on the European Geostationary Navigation Overlay Service (EGNOS, the European GNSS SBAS) meet them.

Reality test UAVs. Photos courtesy Geonumerics.
REALITY is motivated by the urgent need to respond, from an EGNSS perspective, to the challenge of safely integrating hundreds of thousands of non-recreational drones in EU airspace, flying at Very Low Level (VLL) altitude –500 ft above ground-, and at same time, by the challenge of fully leveraging current EGNOS (specifically, its integrity service) for the specific RPAS needs. As seen in preliminary studies, civil aviation standards e.g. APV-I are clearly too conservative, non-protective for RPAS VLL operations, yet EGNOS has potential to be fully unleashed by adapting its integrity performance.
To capture a wide spectrum of reasonably representative application-specific requirements, REALITY works upon four types of market- or social-relevant drone applications as project scenarios: (SC1) maritime surveillance, (SC2) support to fire fighting missions, (SC3) freight transport and (SC4) [urban] aerial mapping. Application-specific requirements will be analyzed and flight rehearsals carried out in REALITY as a benchmark for EGNOS. An output of REALITY will be proposals for next generation Required Navigation Performance (RNP) specifications for RPAS missions tailored to these four representative applications.
On the upstream, RNP specs for drone operations are relevant contributions to the evolution of EGNOS and of European and international GNSS willing to support RPAS markets, and on the downstream, they are also essential for the design of safe and cost-effective drone navigation systems. Another output of REALITY will be the analysis of the contribution of EGNOS and EGNSS to a new generation of RNP-compliant drone navigation systems. (typically including GNSS receivers, inertial units and possibly other sensors like magnetometers or barometric altimeters.) Such an holistic analysis is invaluable for the EU and for aviation regulatory bodies since such a reasoned account of contributions will back a new RNP specification, more stringent than RNP 0.3 and more appropriate for the use of EGNOS and EGNSS in drones, particularly at VLL.