Unmanned vehicles are a key component in the fight to protect oceans and lakes.
To asrobiologists and astronomers, our earth is an ocean planet, a water world. And it really is unique. So far, it is the only planet composed of rocky materials that also is known to possess ample quantities of water. Most of that water is found in oceans that cover some three-quarters of its surface.
Over time, a wide array of human activities has been upsetting their equilibrium.
Likewise, over billions of years, the vast majority of water on Earth has become salty through a continual erosion process that brings into it solution chemicals such as sodium. But it wasn’t always that way. The Great Lakes that both bind and separate Canada and the U.S. are among the largest bodies of “fresh” water on the planet. Although far from primordial in any sense, they are a collective reminder of a time when vast bodies of water were less salty.
They too are under threat.
When the first U.S. Clean Water Act was passed by Congress, one area of obvious concern was in fact the Great Lakes, which had become a dumping ground for untreated sewage and industrial chemicals. Fifty years have brought many improvements but also invasive species and complex challenges such as algal blooms and continued population growth around them.
Fortunately, autonomous vehicles now are doing amazing things. And even in situations that still require human presence or human cognition, the barrier between what machines can do on their own and what requires human interaction are falling.
ENTER AUVS
Hans W. Van Sumeren, director of the Great Lakes Water Studies Institute at Northwestern Michigan College (NMC), is bringing more focus to the Great Lakes. A few years ago, he was impressed by Seabed 2030, the proposed mapping of the world’s ocean floors by that year, which is being conducted in conjunction with the UN’s Decade of Ocean Science for Sustainable Development.
Nevertheless, he asked, “Where do the Great Lakes fit in?” It turns out the Great Lakes hadn’t been included in the plans for Seabed 2030. So, Van Sumeren decided they deserved an effort of their own and launched Lakebed 2030, initially under the auspices of NMC and now run through the Great Lakes Observing System (GLOS).
GLOS has held a number of conferences and grown quickly, with mapping efforts now ongoing. Autonomous underwater vehicles (AUVs), particularly gliders, have become a crucial tool for collecting broad data on the lakes, ranging from oxygen levels and the presence of chlorophyll to numbers and types of fish.
“In our program we use just about all types of marine technology, from autonomous surface vehicles to sensor packages placed on them for observation,” Van Sumeren said. The NMC team deploys an autonomous vehicle from Seafloor Systems of Shingle Springs, California, equipped with sonar from Norway’s Kongsberg Maritime, to pursue its part of the mapping effort. The program also complements Van Sumeren’s other passion: training the workforce “to support the blue economy and the technology that will be needed in the future.”
Whether one looks at the lakes or the ocean, Van Sumeren said, the fact is that neither environment is well studied. “They are sparse data environments.”
Seabed 2030 seeks to fix this. It is actually a collaborative project between The Nippon Foundation and GEBCO (General Bathymetric Chart of the Oceans). The organizations hope to inspire the complete mapping of the world’s oceans by 2030. Then, all the resulting bathymetric data will be made made available to the public for free through the GEBCO Ocean Map. In a recent press statement, Kilaparti Ramakrishna, chair of the newly-formed Seabed 2030 Strategic Advisory Group, said, “It is highly promising to witness top international organizations…combining resources and working together to step up the pace of research in the name of sustainability.”
AUTONOMY AT SEA—AND IN LAKES
There are two primary ways unmanned underwater systems are contributing to ocean sustainability, said Julia Filiberti Allen, Ph.D., chief scientist, autonomy & artificial intelligence at Saab, the defense and technology company based in Sweden.
The first relates to the employment of underwater systems in the furtherance of ocean conservation. “These systems can be used to help us understand the health of the ocean by measuring various characteristics of the ocean environment such as fish populations, chemical content of the water or observation of coral health,” Allen explained.
The second is related to how underwater systems are used. Unmanned systems can be employed to conduct operations that contribute to preventing environmental damage; inspecting underwater infrastructure (like oil pipelines) or performing conservation tasks such as seeding coral beds. As Allen explained, they also can be used for myriad other applications, including observation, surveying, repair and maintenance.
“Increased autonomy and subsea residence help to remove the need for manned support of systems, and in removing the need for manned support, also remove the waste and carbon footprint that comes with supporting those operators at sea,” Allen added.
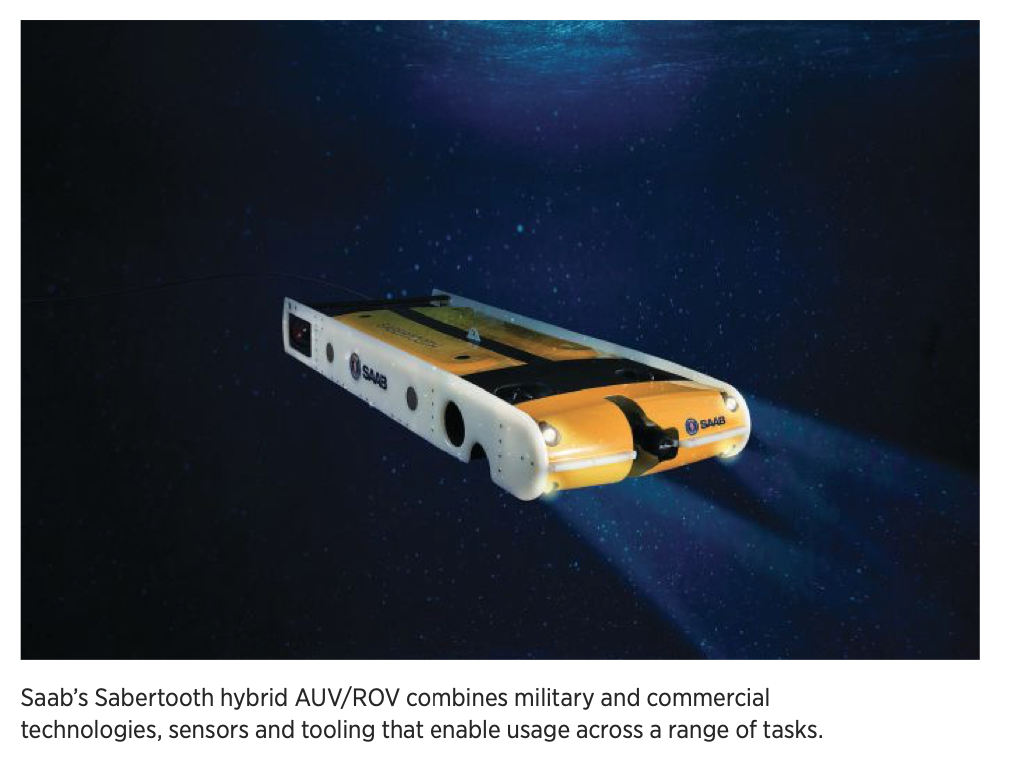
She cites the example of Saab’s Sabertooth hybrid AUV/ROV, which combines many of the technologies employed by Saab’s military and commercial underwater vehicles. This vehicle is capable of being fitted out with a variety of sensors and tooling that enable usage across a range of tasks. For example, Allen explained, its ability to operate in six degrees of freedom and hover in a maintained position in difficult currents makes it an excellent survey vehicle. As a hybrid system, the battery-powered Sabertooth can operate following a preprogrammed mission or may be commanded through either a physical fiber-optic tether or an “optical tether” using such systems as Sonardyne’s BlueComm. Operating from a subsea docking station with power supplied from and data passed to the shore, the Sabertooth may take up residence in a particular area for months at a time to perform environmental sampling tasks with no requirement for direct operator support on the surface.
Sabertooth is already conducting inspections of underwater infrastructure. In the near future, Hibbard Inshore, an underwater services company in Auburn Hills, Michigan, will employ a Sabertooth fitted with the R2Sonic 2024 Multi-beam Echosounder, the Voyis Insight Pro laser scanner, and the ASL Environmental Sciences Acoustic Zooplankton Fish Profiler as part of a NOAA-funded project in Lake Michigan to survey invasive mussel species. The system will mimic the conduct of under-ice operations without having the AUV surface at any time during the operating period. The project is a precursor to actual under-ice operations scheduled for 2022. During this event, operators will base ashore while Sabertooth operates from a docking station in the lake.
Sabertooth is also planning to demonstrate various tasks in early 2022, basing at a docking station and remaining submerged for three weeks during an experiment off Hawaii at the U.S. Navy’s Wave Energy Test Site. Here, the C-Power SeaRAY autonomous offshore power system will provide in situ power, energy storage and bidirectional data transfer between Sabertooth and remote operators ashore, enabling autonomous and remote operations. Sabertooth will conduct infrastructure inspections, survey sea bottoms and monitor sea life in the water column.
ACCELERATING AUTONOMY
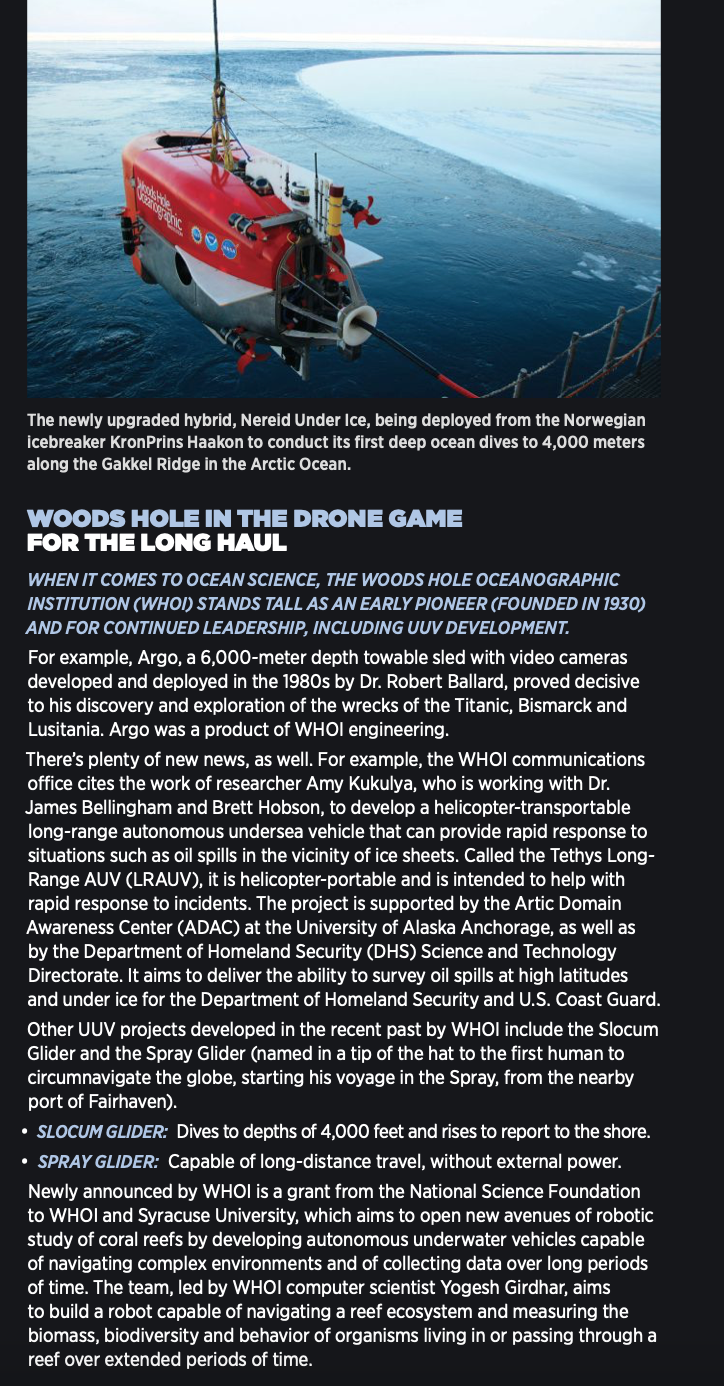
There’s plenty of evidence that the process of enhancing autonomy is accelerating. According to a recent interview published in Oceanus, graduate student Amy Phung, who is enrolled in a joint MIT/Woods Hole Oceanographic Institution (WHOI)program, sees the evolution of autonomy occurring faster and faster; she imagines a not-too-distant future where a scientist could use plain language to ask a question of an autonomous vehicle, like, “Is temperature affecting fish species in this region?”
Recently, Phung has been living inside that evolution, interacting with the institute’s hybrid remotely operated vehicle (HROV) Nereid Under Ice (NUI) using two controllers and a virtual reality head set. Working remotely as part of a NOAA research cruise, she is able to control a core-sampling activity on the sea floor, more than 3,000 miles from her apartment in Cambridge, Massachusetts. Her graduate work is focused on automating the robotic arms that control the sampling, gradually making them less dependent on a human to complete a task. She envisions a future where scientists will be able to query a fleet of robotic UUVs to find the kind of samples needed to answer a research question, with little requirement for further instruction.
Of course, she and WHOI are not the only ones looking to teach old robotic dogs new robotic tricks. In the UK, two other projects are starting modestly but aiming high. Thales, primarily known as a defense contractor, has been providing key technologies for combining robotics, autonomy and artificial intelligence to keep offshore green energy projects from ending up “at sea,” so to speak.
Under the auspices of Offshore Renewable Energy (ORE) Catapult, an organization focused on wind, wave and tidal power, attempts are being made to automate more of the expensive and sometimes dangerous offshore maintenance tasks involved with wind turbine operations. Step one is implementing robotic assistance for humans. But the roadmap aims to deliver autonomous, robot-only maintenance by 2050.
A two-year, £4 million feasibility phase has just been completed. A “mother ship” called Halcyon, a derivative of a Thales mine-countermeasures design, is equipped with cameras able to accurately inspect turbine blades in operation, rotating past the vessel with tip speeds of up to 200 miles per hour.
The camera can automatically detect tiny fissures or indications of lightning strikes; if it does, Halcyon signals the turbine to stop. In a future iteration, Halcyon will deploy a UAV to transport a “blade crawler” to the turbine blade to conduct repairs.
The optical inspection system that is able to remain stable in harsh, wave-tossed environments is derived from Thales defense work. “Increasingly, we are seeing the technologies around robotics, autonomy sensing and AI providing solutions that enable activities in harsh environments to be undertaken using unmanned systems,” stated Dr. Paul Gosling, chief technical officer for Thales in the UK, on the company’s website.
Yet another UK project with full autonomy on the timeline is also linked to ORE Catapult, here working with HonuWorx, a subsea robotics company also located in the United Kingdom. That project also is targeting the weak link in servicing and maintaining offshore renewables: humans.
Surface vessels used to transport technicians can’t operate in all weather, are large and consume substantial amounts of fossil fuel energy to stay on station, and are just plain expensive to operate. The alternative being explored is a submersible mothership called Ridley that will transport ROVs and robots to work sites, and then release them underwater to begin their work—below the disruptive world of waves and wind.
That’s already an ambitious goal but the longer-term focus is on a more capable and autonomous mothership, called Loggerhead, that will provide power and communications for a flock of ROVs and AUVs. This project aims to sharply raise use of ROVs and AUVs, currently limited by support available from crewed surface vessels, potentially making them even more cost-effective.
Adding sophisticated automation software to coordinate systems plus satellite and 4G or 5G communications will ensure coordination and supervision.
In a posted statement, Lee Wilson, HonuWorx CEO and co-founder, explained that “HonuWorx was founded with a vision to accelerate the uptake of underwater robotics technology in vital sectors such as offshore renewables.”
GREATER CAPABILITY
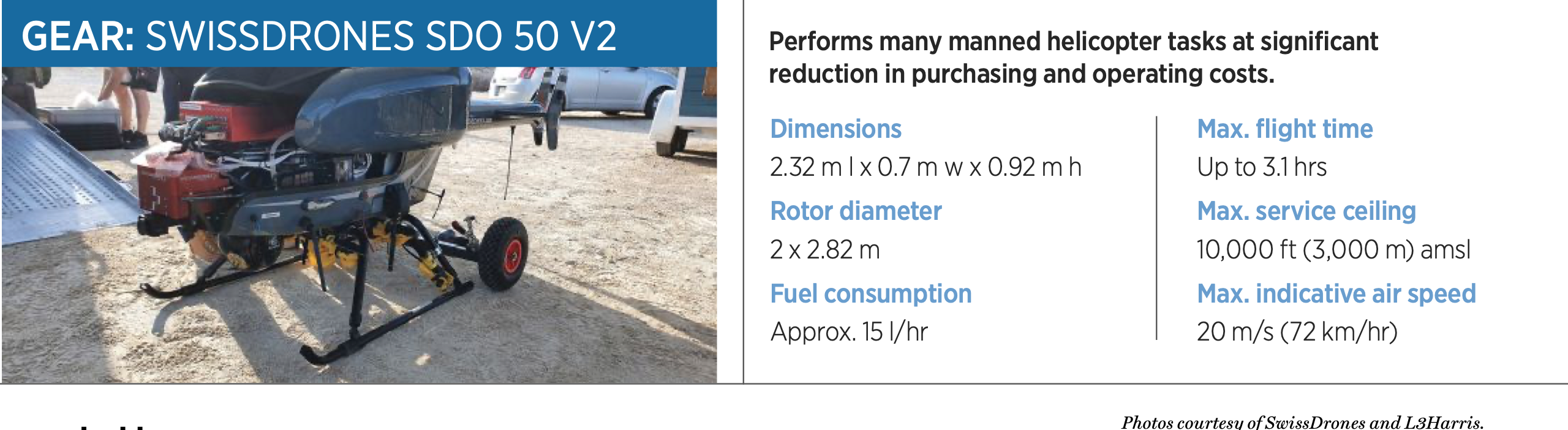
While some companies are focusing on making UAVs even more autonomous and smart, others see an immediate need to make them more capable. SwissDrones, yes, based in Zurich, Switzerland, is a case in point.
According to CEO Ulrich Amberg, SwissDrones identified a need for a UAV with performance that is more like a traditional crewed aircraft, but with the cost and safety advantages of a “drone.”
To address that need, the company designed the SDO 50 turbine VTOL UAV, which can do many of the tasks traditionally assigned to a manned helicopter with comparable turbine performance but at a significant reduction in purchasing and operating costs. Of course, it also has the added advantage of autonomously operating in conditions deemed too dangerous for crewed operations, such as night flying and bad weather. “The SwissDrones SDO 50 is very well suited for long-range operations, both land-based and at sea,” Amberg said.
For maritime environmental monitoring missions, SwissDrones uses AI-enabled sensors that can be smarter and therefore more efficient. For example, with onboard processing, a greater area can be inspected and searched compared to standard solutions. With this technology, the system can scan a stretch of water very systematically using AI algorithms, machine learning and neural networks trained specifically to detect what the operator is looking for, Amberg said. This could be pollution, discovered by using sulfur sniffer sensors, or detection of vessels conducting illegal activities such as dumping waste or illegal fishing. The shore- or vessel-based user sends targets-of-interest coordinates to the video gimbal with a simple click on the user interface. This allows operators to spend their time focusing on the important targets and making faster decisions.
Aside from maritime applications, the platform can also be set up to carry various types of radiation sensors, including detectors for gamma radiations, high-sensitivity module plastic (polystyrene) scintillation detector and neutron module detector. The high-bandwidth data link on the SDO 50 allows data to be transmitted in real time to the ground station, to provide a contemporaneous overview of the radiation sources (imagine a role in a reactor accident like Fukushima or in an accident involving a nuclear-powered vessel). And of course, Amberg noted, the big advantage of an unmanned airborne system is the ability to keep people out of unsafe environments.
Another application for the SDO 50 is adding a laser methane detection payload to identify gas leaks, such as from a pipeline or drilling platform. Many other sensor packages are available in the market including OGI (optical gas imaging), hyperspectral and LiDAR.
“With a built-in GPS receiver, these systems can accurately detect methane leaks from pipelines structures as they fly over,” Amberg continued. Depending on the height and speed of flights, the threshold sensitivity varies from 150 down to 5 parts per million.
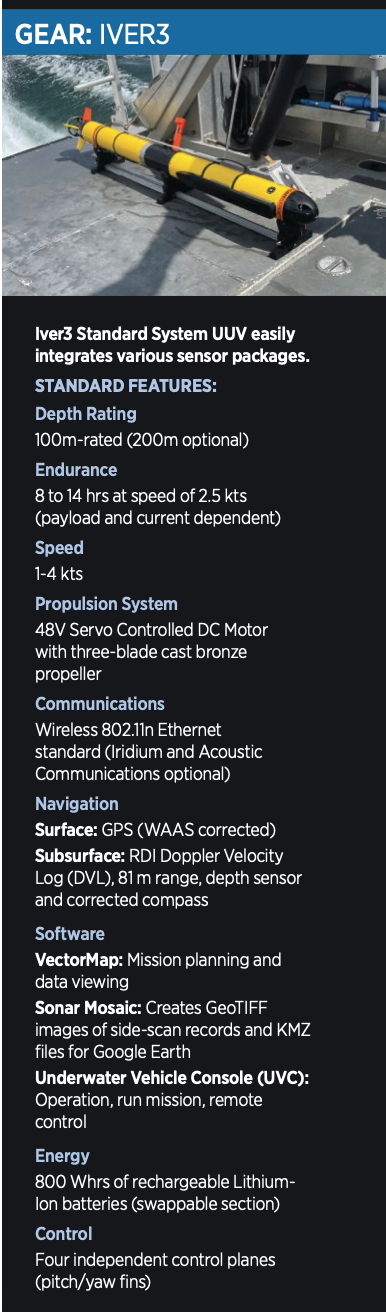
A similar platform approach is on offer from L3Harris, the maker of unmanned and autonomous maritime vehicles located in Melbourne, Florida. The company’s Iver family of AUVs represents a generation of platforms, with more than 15 years of development and 350-plus Iver systems delivered, said Rick Williams, RDML (Ret), director of business development, unmanned surface and subsurface systems. Their strengths, he said, include the ability to easily integrate various sensor packages depending on the mission and switch between energy chemistries “so the operator can dial up or dial down the vehicle’s endurance.”
Williams said more than half of the deployments are for defense-related applications but that the systems have commercial foundations and have expanded their influence into environmental surveys.
Iver reduces risk to human life, improves operational flexibility, increases capacity and enriches data in terms of timeliness, quality and volume across a range of applications at reduced cost.
It boils down to one big advantage, Williams said: These systems take the human out of dangerous environment and provide additional stand-off distance for manned platforms.