The TERMINUS expedition to Greenland is uncovering critical data on glacier-ocean interactions and sedimentation at glacier termini, offering new insights into the factors that drive sea-level rise.

In the summer of 2024, a team of scientists embarked on the TERMINUS expedition to West Greenland, aiming to investigate the dynamics of how glaciers, the ocean and the seabed all interface. Led by Professor Ginny Catania from The University of Texas at Austin’s Jackson School of Geosciences, the mission’s goal was to advance understanding of glacier behavior in response to climate change and its implications for future sea-level rise.
These termini are critical zones where glaciers lose mass through calving and melting, directly influencing sea-level changes. The expedition sought to quantify the rates of these processes, contributing to sediment build-up at the termini of outlet glaciers.
A central component of the expedition was the deployment of the Nereid Under Ice (NUI) submersible, a hybrid remotely operated vehicle developed by the Woods Hole Oceanographic Institution. NUI’s capabilities allowed it to navigate the challenging underwater terrain of glacier fronts, capturing high-resolution data and imagery. This technology provided unprecedented insights into the submerged portions of glaciers, revealing features such as deep channels, overhangs, and ice caverns along the glacial wall.

Over the course of four weeks, the team conducted extensive surveys and sampling of glaciers in the fjords of West Greenland. The data collected, encompassing terabytes of information and numerous glacial sediment samples, is expected to offer valuable clues about the future behavior of the ice sheet.
IUS interviewed Chief scientist Ginny Catania about the research expedition and its use of both aerial and marine unmanned systems.
IUS: Can you share some details about the unique environment of West Greenland?
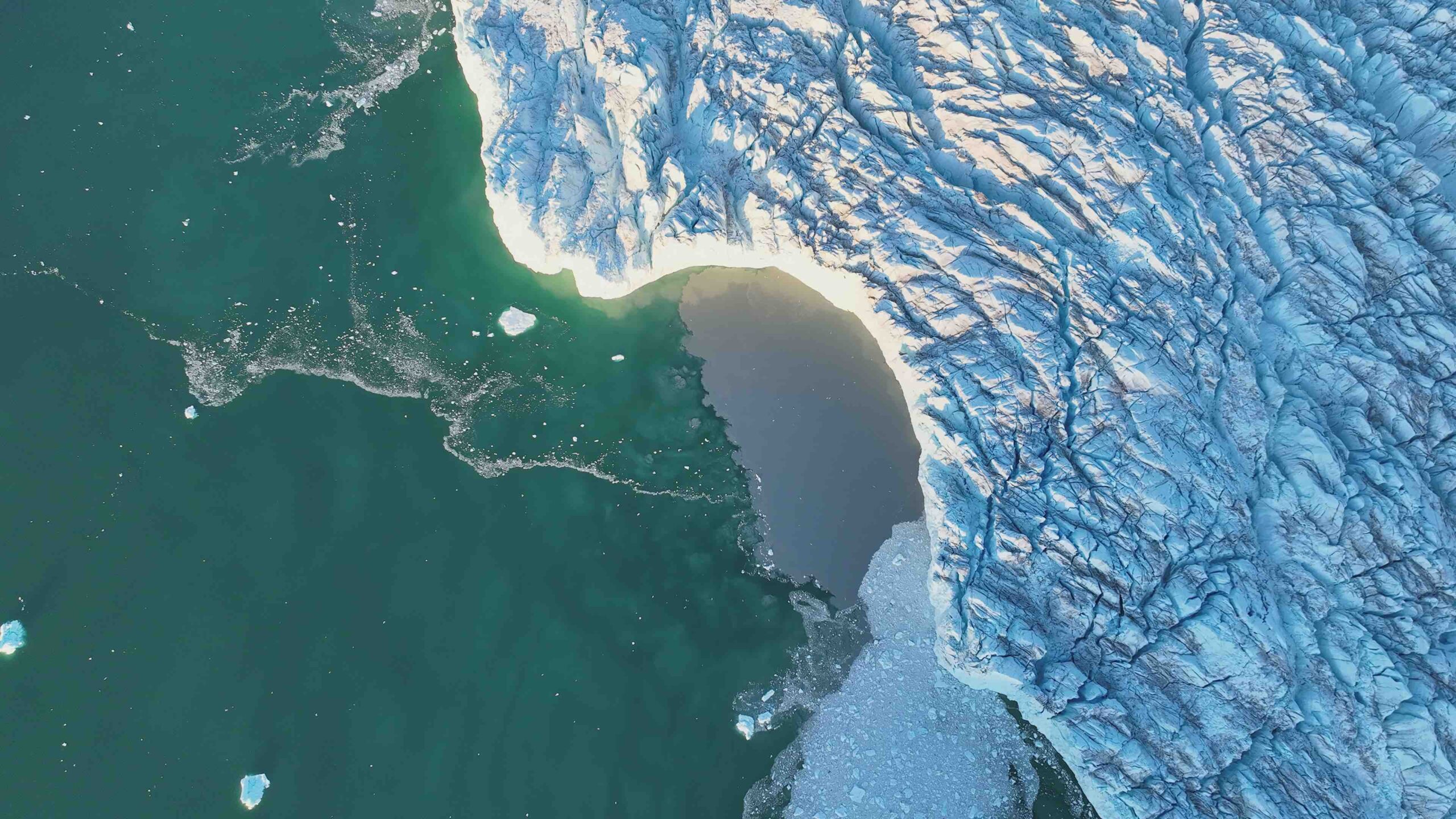
CATANIA: Greenland’s fjord walls are incredibly steep, with cliffs about 1,000 meters high, and glaciers descending from the ice sheet discharge vast numbers of icebergs into these fjords. Constantly navigating icebergs is challenging, so you’re always adjusting your route around them.
The TERMINUS expedition was different from my usual fieldwork. Typically, I’ve been on ice sheet-based expeditions, often camping in extreme conditions. This time, we had a ship with a heated interior, professional crew support. We could run 24-hour operations with a coordinated team. We were remote, seeing only a few hunters and an occasional cruise ship, but that isolation enhances the unique sense of immersion in nature’s scale.
IUS: Why is studying underwater glacier walls in Greenland important for understanding climate change?
CATANIA: In Greenland, around 300 outlet glaciers drain the ice sheet. These glaciers are the primary mechanisms by which mass from the ice sheet is lost to the ocean, driving sea-level rise. While most glaciers have retreated since the late 1990s, their retreat is not uniform—some glaciers have retreated significantly, while others are stable. To attribute these changes correctly to climate influences, we need to understand why this variability exists. Our main hypothesis is that sedimentation near glacier termini might stabilize some glaciers and decelerate their retreat. But it’s nearly impossible to study this sedimentation remotely—90% of these glaciers’ bases are below water and invisible to remote sensing. Our solution was to use the Nereid Under Ice (NUI) unmanned vehicle to directly observe these processes at the grounding lines.
IUS: Could you detail NUI’s sensor systems and how they enable data collection?
CATANIA: NUI, about the size of a small car, has multiple instruments for studying glacier termini. It features forward-looking and downward-facing multibeam sonars. These send out acoustic signals that reflect back to reveal shapes of underwater structures, critical for both obstacle avoidance and for mapping the seafloor and glacier face. Unlike a ship, NUI can get close enough to gather high-resolution morphological data.
NUI also has standard oceanographic sensors for measuring temperature, salinity and pressure. It’s equipped with upward- and downward-facing Acoustic Doppler Current Profilers [ADCPs] to measure water velocity in the water column, which helped us capture discharge from the glacier. When NUI discovered large openings or “caves” in the glacier terminus where water was discharging, it could enter these areas and measure velocity profiles to understand the fluxes.
Another key sensor was a sub-bottom chirp profiler, which provides high-resolution data on seafloor sediment stratigraphy, giving us insights into sediment layers deposited over the past decades. Additionally, NUI has an articulating arm for collecting physical samples, a major challenge in the murky water near the glacier. To overcome limited visibility, NUI’s pilots adopted a technique they called “the bumblebee approach:” hovering above the seafloor with the arm extended, then descending to take samples.

IUS: It sounds like it requires a mix of sensory data and strategic piloting. I understand aerial drones were also part of the expedition. How did they complement NUI’s work?
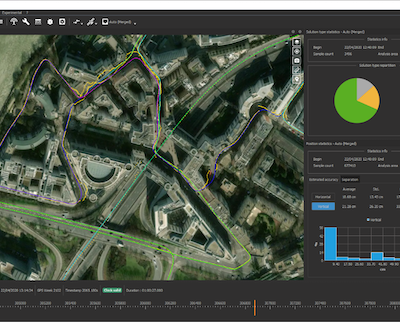
CATANIA: Yes, the drones were essential, even though they were a last-minute addition. They were primarily used for mapping the glacier terminus and reconnaissance of ice conditions before each NUI deployment. With daily ortho surveys, they provided real-time situational awareness, guiding our navigation through ice and around potential obstacles.
We used these drone surveys to construct orthomosaics of the terminus, which were then integrated with NUI’s data for better navigation and mapping. On one occasion, the drone even helped avoid a potential disaster. Just before a planned NUI dive, a fracture in the terminus indicated an impending calving event. We delayed the dive, and shortly afterward, a massive calving occurred, which would have destroyed NUI if it had been in the water.
For scientific analysis, the drones collected high-resolution images and digital elevation models [DEMs]. These allow us to perform feature tracking to measure surface velocities and calving rates. We aim to merge this drone imagery with NUI’s sonar data, creating a complete three-dimensional model of the glacier terminus for unprecedented insights into calving processes.
IUS: Amazing synergy between the aerial and underwater data. Were you able to process any of this data in the field, or will most analysis be done back in the lab?
CATANIA: Field processing was limited to cleaning some initial multibeam data. Much of the data—multibeam, chirp and sediment cores—requires detailed cleaning and processing back at the lab. For instance, NUI relies on dead reckoning for navigation, which provides around a 20-meter positional accuracy. To refine that for our analyses, we’ll optimize the navigation data, adjusting it for features that are stationary over multiple surveys. This calibration will then be applied across all data points, improving the accuracy of measurements for suspended sediment, velocity and sub-bottom data.
IUS: With this volume of data, does increased automation or autonomous analysis present advantages for future expeditions?
CATANIA: With larger data sets becoming the norm, automated data processing and AI-based analysis are critical for making sense of the information. For example, remote sensing increasingly uses AI for extracting insights from large image sets, which could be applied here to quickly categorize features. However, scientific validation will always require human oversight to ensure the data aligns with our physical understanding of the environment.
IUS: Have you been able to draw any preliminary conclusions?
CATANIA: Yes, some interesting findings have emerged. NUI’s high-resolution mapping of the moraine at the glacier terminus shows high sediment fluxes, similar to river or delta systems. We captured a large calving event revealing a 40-meter layer of sediment-laden ice, or “dirty ice,” suggesting a process called freeze-on, where sediment is progressively incorporated at the glacier base. This layer could indicate that freeze-on plays a significant role in thickening the glacier, a previously underestimated factor.
Another discovery was the presence of large, water-filled openings—or “caves”—in the glacier terminus, which release sediment-laden water, visible from satellite images as sediment plumes in the fjord. Additionally, some areas of the terminus have narrow, linear openings along the bottom, with water leaking out and forming grooves, potentially due to buoyant freshwater rising along the terminus.
IUS: It sounds like your work could lay the foundation for future expeditions and model testing. Looking ahead, what are your goals for future research?
CATANIA: I’m already considering proposals for a follow-up expedition, possibly with an icebreaker to access more challenging, ice-choked fjords and sample newly revealed areas. We aim to use NUI to investigate other glaciers that have recently retreated. Although funding remains a challenge, especially for field-intensive research, I believe our findings here can demonstrate the scientific value of such work.
In terms of broader goals, understanding these glaciers’ physics better is key. While discussions around glacial geoengineering have gained attention, I believe our primary focus should be on understanding these systems in their natural state before considering interventions.