By Point One Navigation
The Point One team breaks down the relationship between RTK, epochs, and datums to explain how these elements work together to create the most precise navigation systems for autonomous vehicles.

The importance of precision location for autonomous vehicles
Achieving the ideal precision for autonomous vehicles (AV) navigation is critical to ensuring the safe and effective operation of this exciting new technology. However, our physical world’s dynamic nature makes this a difficult challenge to overcome.
Imagine an AV using GNSS to navigate a busy city. The Earth is constantly shifting, and this movement introduces complexities for maintaining a stable frame of reference for the AV to use when navigating. This particular AV’s navigation system is referencing an older datum, causing misalignment between the AV’s perceived location and the actual road. The result? An inefficient and potentially dangerous situation.
Not every AV situation is so intense, as unmanned vehicles can also include delivery robots, lawnmowers, and other devices with lower stakes; regardless, precise positioning is important to provide a positive user experience.
Luckily, advancements in real-time kinematic (RTK) positioning technology can be leveraged along with a deep knowledge of reference frame epochs and datums to power the most precise AV navigation systems and avoid these types of scenarios.
To fully grasp how datums, epochs, and RTK can collectively power AV navigation systems, it’s important to understand their differences and how they complement each other. In this article, we’ll dive deeper into the relationship between these elements and how they all work together to create the most precise positioning data for navigation.
Understanding discrepancies in navigation coordinate systems
We commonly consider coordinates on Earth’s surface as consisting of latitude, longitude, and altitude (LLA). In the realm of high-precision systems, it’s important to specify both the coordinate frame in which these LLA coordinates are defined and the time at which they are expressed, referred to as the epoch. The epoch corresponds to the time of measurement, whereas the datum establishes the coordinate frame itself based on Earth’s positional conditions.
For spacecraft operating within global navigation satellite systems (GNSS), like GPS, coordinate transmission occurs in the form of Earth-centered, Earth-fixed (ECEF) cartesian coordinates, such as WGS-84 or ITRF14. These ECEF coordinate systems remain unaltered regardless of epoch. GNSS receivers inherently calculate their positions using these ECEF coordinate systems. These coordinate systems are highly effective in describing spatial and airborne positions. However, positions on Earth undergo gradual shifts in relation to ECEF coordinates over time due to the movement of tectonic plates. A stationary physical point relative to local geography, such as a building corner, will exhibit time-dependent LLA coordinates in the WGS84 reference frame.
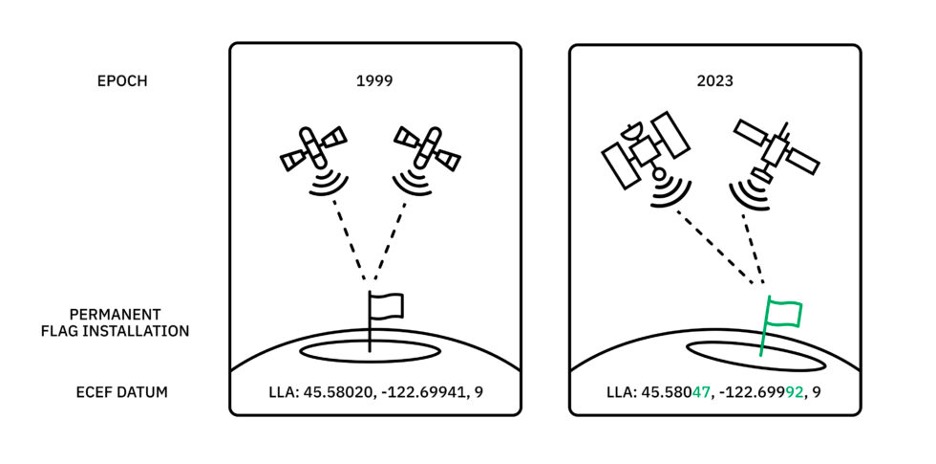
Consider a scenario where a pole was securely anchored into the ground back in 1997. When compared to its current position, it has shifted more than 1 meter over time due to tectonic movement. Utilizing an Earth-centered, Earth-fixed (ECEF) coordinate system to represent the pole’s location for visual representation or basic geospatial analysis suffices for capturing its relative position on Earth. However, it proves insufficient for supporting navigation solutions requiring absolute positioning. Thinking about our earlier AV example, such an inconsistency in positioning could result in the AV crashing into the pole.
To tackle this challenge, surveyors and geodesy professionals employ coordinate frames affixed to tectonic plates, such as the NAD83 systems used in the United States. In these plate-relative coordinates, positions referenced to local geography remain constant. In the previous example, the cemented pole maintains an LLA that remains largely consistent year after year when measured within the NAD83 coordinate frame. Although these coordinates are only roughly identical because the NAD83 realization does not perfectly align with actual tectonic drift, the datum significantly enhances accuracy for precision positioning applications, like AVs.
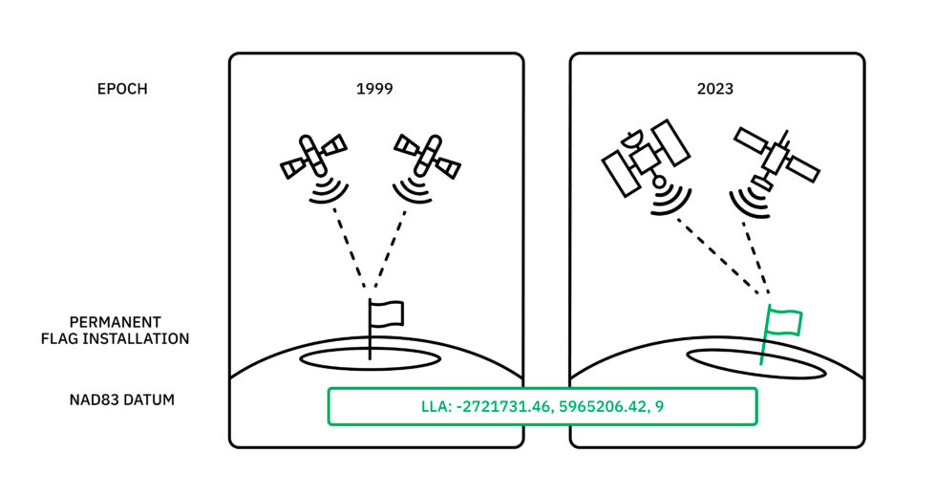
Nonetheless, this approach has introduced an inconsistency: the latitude, longitude, and altitude represented in WGS84 differ from those expressed in NAD83. The disparity between these two reference frames is not static; it varies with time. The conversion between the two implies knowledge of the specific time you seek to understand and adjust for. For instance, the displacement in our pole example could be 1 meter concerning the NAD83 frame at the epoch of 2019, but it might only amount to 50 centimeters for the NAD83 frame at the epoch of 2005. Without information regarding the relevant epoch, it’s impossible to transition between coordinate frames.
So what does this all mean for AVs, and how can RTK help?
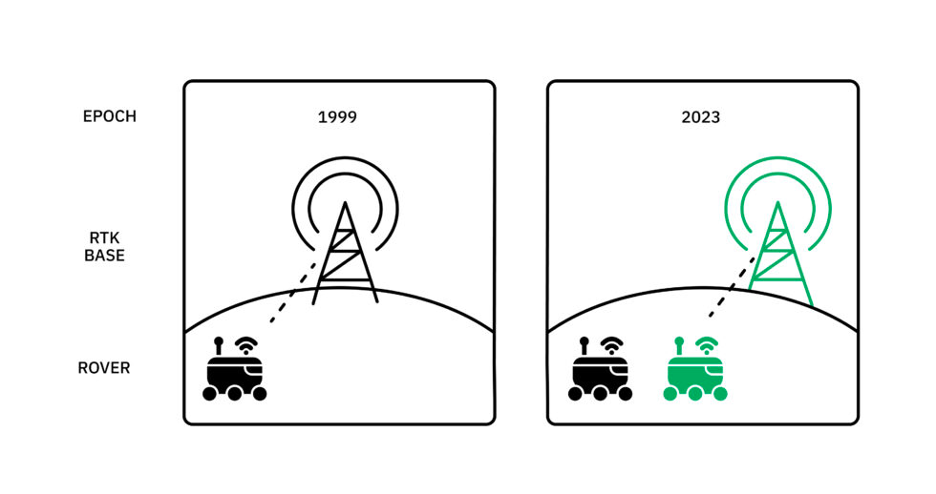
RTK and similar GNSS correction solutions offer exceptional precision to augment information from datums and epochs. While their ability is limited to measuring positions relative to a known point, they provide excellent data to complement the reference frame. For AV navigation specifically, RTK can correct inaccurate GNSS signals to keep the vehicle on a safe and efficient path, but developers should understand how this data is related to reference frame datums and epochs to build truly precise navigation systems.
For instance, RTK networks can compute positions within the global frame (e.g., WGS84) by determining the AV’s position related to the reference station and then adding this difference vector to the established reference station position. Consequently, RTK implicitly operates within the same frame as the reference station’s position, which is transmitted through the RTCM 1005 or 1006 message. Understanding this relationship is important for AV developers optimizing for high precision.
In the earlier cemented pole example, if we establish an RTK reference station at the same location, positions computed using measurements from this reference station will align with both the datum and epoch in which the RTK reference station was surveyed. It’s crucial to note that even if the reference station was initially surveyed in WGS84, but the survey took place in 2005, a 50 cm discrepancy would emerge if we expected the RTK network to provide results in the 2019 frame.
Summing it up: your AV needs RTK
Understanding these intricacies of RTK and its relationship with datums and epochs is vital for achieving the highest level of precision and accuracy in GNSS-based positioning data for AVs, ensuring the smooth navigation and operation of self-driving vehicles, delivery robots, lawnmowers, and more.
To account for the Earth’s constant state of change and any resulting misalignment in mapping data, epochs provide representations of specific points in time when measurements are made. By adjusting the epoch to the present moment, AVs can correct their position based on the current datum to best align with the road. Still, to ensure AVs can navigate with precision, they must be equipped with the right technology to adapt to changing landscapes and ensure their positional data remains accurate in real-time. This is now possible with the increasingly accessible and affordable RTK solutions now available on the market.
Point One Navigation has a suite of navigation-focused positioning solutions to help developers harness true positioning data and ultimately deliver the most precise products and applications to their end users, including AV companies. With Point One’s leading location technology, developers can seamlessly align datums, epochs, and RTK for the most reliable positioning data to power safe and efficient AV navigation.
To learn more about Point One’s RTK solutions for AVs, visit pointonenav.com