Civil engineer/surveyor firm Crafton Tull, equipment provider Navigation Electronics, Inc. (NEI) and systems integrator Microdrones collaborated to solve a literal cliff-hanger.
Some customers just like it wild. So when a client wanted to link a county road at the top of an Ozarks “hill” down to Big Creek, where he hoped to build a cabin, the resulting challenges would test three companiesʼ skills before surveying could be completed. By the end, though, creative thinking and LiDAR solutions would lead the team to christen the resulting survey “Project Success.”
Collaboration and Challenges
Because of the varied terrain, the landowner knew he needed an engineer-designed road, not just a bulldozed one. And the engineer would need a surface model that could decipher dense woodland, elevation changes and the contours of a sheer 100-foot bluff. Surveying the entire site without a drone would take two to three weeks, be dangerous and might well yield data without the desired density and accuracy.
For some years, Crafton Tull, the Oklahoma-Arkansas surveyors, has purchased geospatial equipment from Louisiana-based Navigation Electronics (NEI), so staffers listened when NEI approached the company with a new drone system and a new way of surveying. “At Crafton Tull, we stay on top of technology, so it intrigued us,” recalled Nick Tucker, vice president of the company’s energy division. Matt Rosenbalm, Microdrones’ sales manager southern U.S., came from the Atlanta area to join NEI sales and sup- port representative Ross Kenney and provide manufacturer backup for what was emerging as a unique project. Tucker’s response to the pitch: “Man, we’ve got to have this.” Two months later, they did.
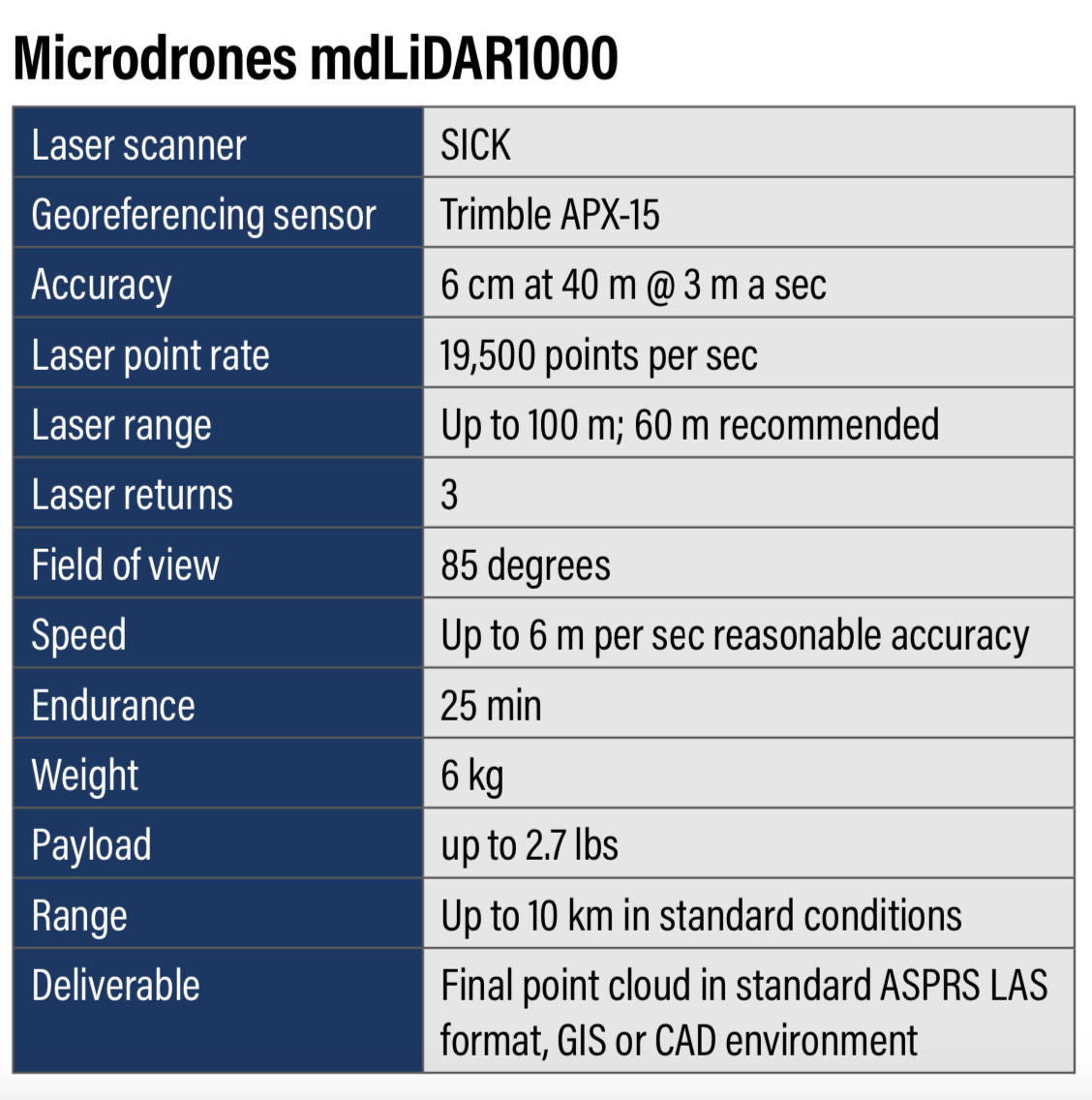
The Microdrones mdLiDAR1000 would provide an end-to-end point cloud delivery solution combining a drone, a LiDAR pay- load, a camera, fully integrated software workflow and technical support. With mission planning via the mdCockpit, the system consistently delivers accuracy of 5 to 6 centimeters (0.2 feet) when flown at 40 meters (130 feet) at a speed of 3 meters/second (6.7 miles per hour). For this surveying job the system would produce a 3D point cloud and process it into a Trimble Business Center.
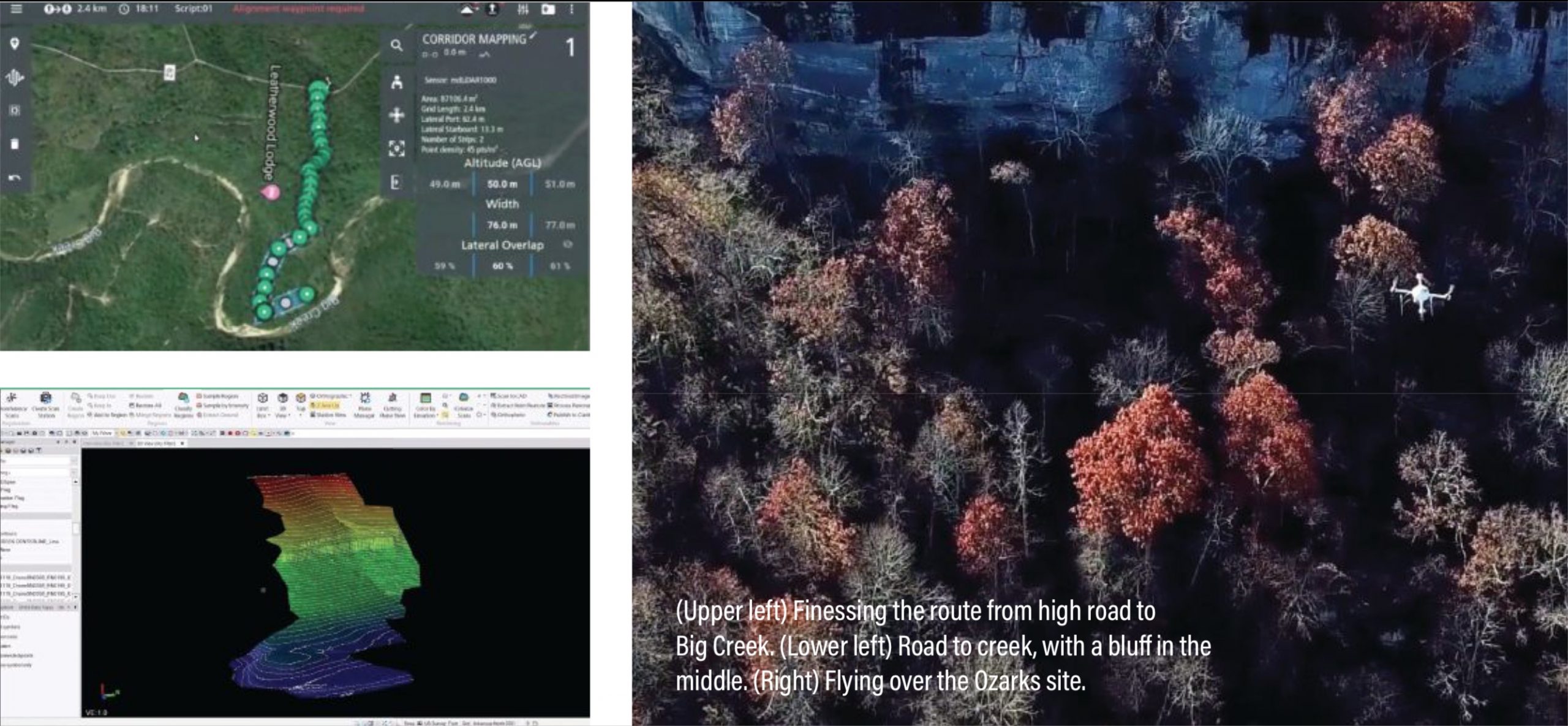
On site, the project followed the Microdrones workflow of plan- fly-visualize-process. Yet deploying a UAS was no cinch. The initial flight plan suggested flying 33 strips at 50 meters over 150 acres of timberland, but a discovery flight revealed a long taxi and difficult terrain would cut into battery time. There also was what Tucker called “high drama” after takeoff. “It was kind of nerve-wracking for the first flight, and once the mdLiDAR1000 got 3,000 feet away, the depth perception really played a part,” he said. “You really couldn’t tell whether it was going to hit the trees, how high it was, looking at the screen, or even at the drone.” Waypoint placement was limited to every 30 meters, and the bluff’s edges meant the drone would have to “stairstep” for image capture, further reducing efficiency.
“This one is obviously putting everything to the test,” Microdrones’ Rosenbalm remarked.
It was time to call an audible, and fortunately a lifelong local resident and land manager was on hand to suggest a more efficient route. Randy Woods had walked the land and knew of a less-violent niche in the bluff. “This dramatically reduced our project area and our project limits,” Tucker recalled. “Randy helped save the day. Why survey the whole project? Survey the only place you can build the road.”
Mission Possible
To negotiate the 500-foot terrain change, Woods and Greg Long, LEED AP and Vice President at Crafton Tull walked this new scenario with a hand-held GPS, with Long creating waypoints as they went. The resulting data generated a corridor with 150 feet on each side along the only route where the road to the river could potentially be built. As Tucker suggested, the new path cut the project area to a fraction of the original footprint.
Over three flights, the LiDAR collected data that might otherwise have been obscured by the forest canopy. The drone flew down the existing road, up from the creek bed and through the middle 200 feet. A data gap around a bluff’s extreme drop-off was resolved with a fourth, manual flight performed by Crafton Tull UAS pilot Jeff Davis. Tucker: “We sent the drone to the flight block, put it in a holding pattern, walked through the woods to where we could actually spot the drone at the flight area and then Jeff manually flew the bluff area, manually triggering the scanner to capture the data—and then we sent it back to the landing spot and then walked back through the woods to land the drone.”
Innovation ruled when it came to maintaining line of sight. Rosenbalm vividly recalled that for one flight, Davis “is literally standing on the balcony of a lodge, peeking his head over, mak- ing sure he can see the drone.” Fortunately, Davis kept his bal- ance; the only glitch was that a support ATV got a flat tire.
The resulting data captured the trees, lower vegetation and the ground itself. Point cloud classification got it down to bare earth and the surface model the engineer needed to submit a proposal, along with design and cost estimates—allowing Tucker to again christen the data collection “Project Success.”
Postmortem
“We were able to overcome all those challenges in a short time, capture all the data we needed for the designers and the client to push forward with the project,” Tucker concluded. “The data we’ve processed is very good, and I think everyone is going to be satisfied.”
Tucker also gave a shout-out to his Microdrones partner. “The Microdrones product and everything they’ve built into the platform itself, with the Terrain Follow, the planning functions in the software itself, really helped us through this project and gave us an edge over some of the other UAVs we’ve used in the past.”
Davis seconded that. “Whenever we’re on a project, using their stuff, we feel like Microdrones in there with us. If we ever need any kind of support, they’re right there.”